0.
INTRODUCCIÓN
El proyecto a realizar esta incorporado en la
tecnología sin zanja que consiste en instalar, reparar o
renovar conductos subterráneos, utilizando técnicas
que minimizan o eliminan la necesidad de
excavación.
Es un diseño en el que se ponen en
práctica los conocimientos adquiridos a lo largo de la
carrera tanto en la parte mecánica como la parte
eléctrica y electrónica ya que se hace necesario el
diseño de mecanismos y elementos de máquinas
así como la selección de accionamientos
eléctricos para condiciones de trabajo especiales,
cumpliendo así con un objetivo del trabajo de grado como
requisito para obtener el título de Ingeniero
Electromecánico.
Este proyecto busca diseñar una máquina
que permita realizar trabajos de excavación a peque
ña escala y grandes distancias para minimizar los costos y
el impacto ambiental negativo que se presentan cuando se instalan
redes subterráneas de distribución de servicios
públicos.
El proyecto consta de una recolección de
información de los métodos y maquinarias
utilizados, un análisis para determinar los
parámetros de diseño a tener en cuenta y analizar
cual es la mejor alternativa de solución y un
diseño preliminar de la máquina en el que se
practica una retroalimentación de los pasos anteriores
cada vez que se requiere.
1. ALTERNATIVAS
DE SOLUCIÓN
El proyecto a realizar está incorporado en la
tecnología sin zanja que consiste en instalar,
reparar o renovar conductos subterráneos, usando
técnicas que minimizan o eliminan la necesidad de realizar
excavaciones a lo largo de dichos conductos, a
continuación se muestran algunos de los métodos
más utilizados actualmente para realizar este tipo de
trabajo (ver anexo 1) .
1.1 CAMPOS
BÁSICOS DE LA TECNOLOGÍA SIN
ZANJA1
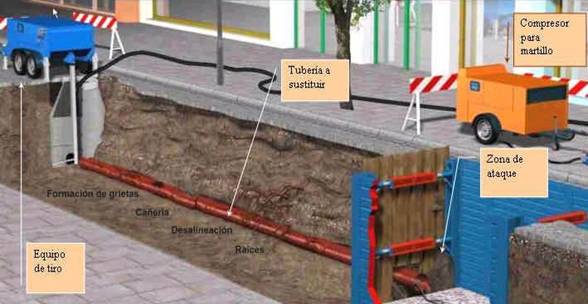
1.1.1 Sustitución in situ. Los sistemas
pipebursting, constan de un conjunto rompedor
neumático o hidráulico, que simultáneamente,
revienta el conducto existente e instala la nueva tubería,
trabajando en combinación con un equipo de tiro que
arrastra el conjunto por el interior del conjunto a sustituir.
Esta técnica se desarrolla a principios de los años
ochenta en Estados Unidos (ver figura 1).
Figura 1. Esquema del sistema
pipebursting.
Fuente:
http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_BURGOS_archivos/
frame.htm#slide0024.htm
1.1.2 Instalación de nuevas tuberías
por medio de topos. Este sistema fue desarrollado en Polonia
y Rusia en los sesenta, presentando al principio muchos problemas
de desviación y pérdidas de equipos. Se basa en la
creación de una perforación con base e n compactar
el terreno circundante con un martillo de percusión de
camisa cilíndrica, en la mayoría de los casos en
forma de torpedo, la conducción a colocar va
inmediatamente después del torpedo. Sólo se pueden
utilizar en terrenos compactables y en longitudes y
diámetros reducidos (ver figura 2).
Figura 2. Esquema del sistema "Impac Moling".

Fuente:
http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_BURGOS_
archivos/ frame.htm#slide0024.htm.
1.1.3 Instalación de nuevas tuberías
por medio de hincadores neumáticos ("Pipe Ramming").
El "Pipe Ramming" es un sistema de perforación no
dirigible, que se basa en la introducción en el terreno de
una vaina de acero, con cabeza abierta, por medio de golpeo. En
condiciones de suelo adecuadas se pueden utilizar cabezas
cerradas (ver figura 3).
Figura 3. Esquema del sistema de instalación de
tuberías por medio de hincadores
neumáticos.

Fuente:
http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_ BURGOS
_ archivos/ frame.htm#slide0024.htm
Su realización requiere la ejecución de
una zanja en el punto de ataque, con la alineación y cota
adecuada para el servicio a instalar. La longitud del foso
requerido es variable, siendo ideal 16 m de longitud (12 m de
vaina de tubo de acero, y 4 m de espacio para la operación
del martillo de golpeo). Es una técnica válida en
casi todos los tipos de terreno, a excepción de los que
tienen rocas de demasiado diámetro y dureza.
1.1.4 Instalación de nuevas tuberías
por medio de perforación dirigida. Las técnicas
de perforación guiada se usan para la instalación
sin zanjas de nuevos conductos. La operación se completa
en dos fases. La primera consiste en la realización del
taladro piloto guiado. Después se amplia la
perforación hasta permitir el paso del conducto a
instalar. La perforación dirigida es viable a partir de
los avances electrónicos que permiten la detección
de la posición de la cabeza y el uso de lodos de
perforación (ver figura 4).
Figura 4. Esquema del sistema de instalación de
tuberías por medio de perforación
dirigida.

Fuente:
http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_BURGOS
_archivos/ frame.htm#slide0024.htm
1.1.5 Instalación de nuevas tuberías
por medio de hinca hidráulica. Es uno de los sistemas
más antiguos y de menor evolución para la
instalación de nuevas tuberías de hormigón.
La hinca se realiza por medio de empuje sucesivo de tubos de
hormigón de características especiales. El residuo
se extrae por medio de excavación manual o con rozadora en
el frente de perforación. La dirección se asegura
por medio de puntero láser, realizando pequeñas
correcciones con base en empujes diferentes de los cilindros (ver
figura 5).
1.1.6 Instalación de nuevas tuberías
por medio de Raise-Boring. Es un sistema diseñado
especialmente para realizar trabajos de perforación
vertical en minería pero se han realizado
modificaciones en la configuración del equipo para poder
realizar perforaciones en horizontal (ver figura 6).
Figura 5. Esquema del sistema de
instalación de nuevas tuberías por medio de hinca
hidráulica.

Fuente:http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_BURGOS_archivos/
frame.htm#slide0024.htm
Figura 6. Esquema del sistema de
perforación Raise-Boring.

Fuente:http://www.aples.net/Presentaciones/XI_MUESTRA_INDUSTRIA_BURGOS_archivos/
frame.htm#slide0024.htm
1.1.7 Perforación de largas
distancias, microtuneladoras (diámetro menor a
2.5 m y TBM´s (Tunnel Boring Machine)
diámetro mayor a 2.5 m). Las
microtuneladoras constituyen uno de los sistemas más
complejos y avanzados que se utilizan en la
actualidad. Formadas por cabezas de perforación de
sección completa, realizan la excavación del frente
de forma mecanizada y pueden perforar prácticamente en
cualquier tipo de terreno con los elementos adecuados. A
continuación se exponen algunas de estas.
1.1.7.1 Microtuneladora con acceso al frente. De
entre todas las microtuneladoras que aplican lodos de
extracción que existen en el mercado, destacan las
microtuneladoras con un rodamiento / accionamiento
periférico, donde en su interior se encuentra la puerta de
acceso a la cámara de machaqueo. Gracias a esta puerta de
acceso y al nuevo diseño de discos de corte se permite
cambiar las herramientas de corte desde la parte posterior de la
rueda de corte (cámara de machaqueo) sin necesidad de
acceder al frente (ver figura 7).
Con estas novedades se ha ganado en rapidez y en
seguridad. Además, ahora las microtuneladoras para hincas
de diámetro nominal 1200mm permiten esta nueva
ejecución mientras que anteriormente las microtuneladoras
con puerta de acceso al frente debían ser como
mínimo para hincas de diámetro nominal 1600mm.
Estas novedades permiten realizar hincas de larga distancia en
terreno rocoso de gran dureza a partir de diámetro nominal
1200mm.
Figura 7. Esquema de una microtuneladora con acceso al
frente.

Fuente: www.microtunel.com
1.1.7.2 Microtuneladoras EPB. Las
microtuneladoras EPB son las ideales para trabajar en terrenos
homogéneos y blandos, con condiciones geológicas
estables.
Estas microtuneladoras se fabrican para diámetros
superiores a 1400 mm. El material se extrae del frente mediante
un tornillo sinfín. Una vez evacuado del tornillo
sinfín se extrae al exterior gracias a una potente
bomba.
El modo EPB garantiza la estabilidad del frente de
excavación, evitándose la realización de
cavernas o desprendimientos en el frente. Si fuera necesario,
estas máquinas están equipadas para inyectar agua o
espuma al frente para tratar así el terreno para su
excavación (ver figura 8).
Figura 8. Esquema de una microtuneladora EPB.

Fuente: www.microtunel.com
1.1.7.3 Topos. Los topos son tuneladoras
diseñadas para poder excavar rocas duras y medias sin
grandes necesidades de soporte inicial. Los elementos
principales que forman un topo son dos, la cabeza de corte
y la sección de anclaje, compuesta a su vez por los
codales o grippers, los cilindros y el back up o carro
estructural. En el diseño de un topo, la parte fundamental
a estudiar con más detenimiento es la cabeza de corte y la
posición de las herramientas de corte, discos de corte,
rastrillos, cangilones de desescombro y coppy cutters que se van
a instalar en ella. La fuerza para realizar el avance se obtiene
como reacción de los grippers contra el terreno (ver
figura 9).
Figura 9. Esquema básico de un topo.

Fuente: www.microtunel.com
Existen otras clases de topos, como el topo ensanchador
que, como su propio nombre indica, es aquel que se utiliza para
agrandar túneles y así evitar las consecuencias de
las fuerzas de agarre en la excavación finalizada, ya que
los topos ensanchadores tienen los grippers delante de la rueda
de corte.
Los topos para planos inclinados están
especialmente diseñados para la realización de
túneles con pendientes mayores de 10% y que han llegado al
50%. Estos topos han sido utilizados en la construcción de
funiculares subterráneos a estaciones de esquí,
túneles de centrales eléctricas, minas,
etc.
1.1.7.4 El doble escudo. Los dobles escudos son
tuneladoras con características mixtas entre el topo y el
escudo. La característica principal es que está
dotado de dos sistemas de propulsión independientes donde
el primero de éstos corresponde al sistema de
propulsión del escudo y el segundo al del topo. El doble
escudo es un escudo telescópico articulado en dos piezas
que proporciona un sostenimiento continuo del terreno durante el
avance del túnel (ver figura 10).
Las distintas posibilidades de trabajo que ofrecen los
dobles escudos permiten conseguir unos rendimientos
próximos a los de los topos, que los escudos para roca
dura no podrían conseguir. Al igual que los escudos para
roca dura los dobles escudos permiten realizar túneles a
través de terrenos con geología cambiante e
inestable que los topos no podrían realizar.
Figura 10. Fotografía de un doble
escudo.

Fuente: www.microtunel.com
El escudo delantero sirve como estructura soporte de la
cabeza de corte, contiene el rodamiento principal, la corona de
accionamiento y los sellos interno y externo. El escudo trasero o
escudo de anclaje, incorpora las zapatas de los grippers
operables a través de ventanas. En su parte posterior
incorpora el erector de dovelas y los cilindros de empuje para la
propulsión en modo escudo normal.
1.2.
MECÁNICA DE LOS SUELOS A EXCAVAR
Para determinar la posibilidad de la ejecución de
una perforación es necesario realizar al terreno un
estudio geotécnico básico, que entregue
información sobre los tipos de terreno a excavar y su
comportamiento, para disponer de antemano de una serie de medios
y cálculos con los cuales comenzar el trabajo tratando
de controlar una serie de riesgos establecidos2.
Algunos de estos valores que entrega un estudio geotécnico
son:
– Granulometría .
– Consistencia.
– Humedad.
– Permeabilidad.
– Estratigrafía , buzamiento y fallas.
– Factores climatológicos, (aguas, lluvias,
hielos, sequía).
– Vibraciones.
Composición de los suelos. Los suelos se componen
de partículas sólidas y huecos. Los huecos pueden
retener agua en mayor o menor medida de acuerdo con el tipo,
forma, tamaño y disposición de las
partículas que condicionan la permeabilidad a
través del tamaño de los poros. Del contenido de
agua retenida depende a su vez la deformabilidad y resistencia
del suelo. Así podemos diferenciar varias
clases:
?? Los suelos de grano grueso o arenosos, son
permeables y su comportamiento mecánico viene definido por
el peso y rozamiento de sus partículas; su resistencia es
función de la proximidad de sus partículas entre si
(densidad relativa). Las deformaciones motivadas por la
acción de fuerzas exteriores se producen con
rapidez.
?? Los suelos de grano muy fino, arcillosos,
contienen huecos muy pequeños y son impermeables, por lo
que retienen el agua; su comportamiento depende de la
película de agua existente entre sus partículas; su
resistencia depende del espesor de esta película, cuanto
más gruesa es más débil el suelo; las
deformaciones son motivadas por la acción de las fuerzas
exteriores, se producen muy despacio, ya que el paso de agua a
través de los huecos es un proceso lento.
?? Los suelos limosos tienen un comportamiento
intermedio. Los inorgánicos son suelos de grano fino con
poca o ninguna plasticidad. Generalmente se denominan polvo de
roca, que se constituye de partículas más o menos
equidimensionales de cuarzo.
Granulometría : se denomina composición
granulométrica al conjunto de distintos tamaños que
integran un suelo en relación con el peso total del mismo.
Para conocer el tamaño exacto de las partículas del
suelo se procede a un estudio granulométrico.
Las partículas grandes se identifican por tamizado hasta
63 micras. Las de menor tamaño se identifican por
sedimentometría basada en la ley de Stoket o bien por
centrifugado.
Casi todos los técnicos de mecánica del
suelo, emplean su criterio y experiencia personal para la
clasificación del mismo, la mayoría se basan en la
diferenciación de cuatro fracciones
granulométricas: la fracción arena y grava se puede
subdividir en fina, muy fina y gruesa; las gravas mayores pueden
denominarse como bloques; las arcillas suelen encontrarse en la
fracción más pequeña del material del suelo,
superando raramente las 4 micras de tamaño; y entre las
cinco y setenta micras podemos encontrar los limos.
La resistencia mecánica de los suelos arenosos,
arcillosos y limosos ya mencionados son bajas comparadas con las
rocas que se pueden encontrar en los trabajos de
perforación, por eso también se describe en esta
sección las propiedades de estas por ser de mayor
importancia para el diseño del sistema de corte de la
maquina.
RS Dureza de las rocas.
La resistencia a la compresión simple es el mejor
indicador de la dureza de las rocas frente a su aptitud a la
trituración. Esta resistencia puede estimarse, sea
directamente en el laboratorio, ensayando muestras provenientes
de perforaciones con recuperación de núcleos, o
indirectamente en el campo, a partir de muestras irregulares
mediante el ensayo de carga puntual, o aún en el mismo
macizo mediante la lectura de rebote del martillo Schmidt, o,
finalmente, a partir de tablas de clasificación de dureza,
tabla 1 (ver anexo 2).
1.3 NORMATIVIDAD
DE LAS REDES SUBTERRÁNEAS.
Existe poca normatividad acerca de la instalación
de tubería subterránea por medio de
tecnología sin zanja por ser este método
relativamente nuevo en Colombia por lo que los parámetros
resultantes de una instalación hecha a través de la
tecnología sin zanja deben adaptarse a la
regulación establecida para la instalación por lo
métodos tradicionales como el grado de compactación
del terreno, la profundidad a la que se debe instalar la
tubería, ángulo de inclinación, la
separación mínima permitida con otros servicios,
etc. según la función a realizar: red de agua
potable, aguas servidas, red eléctrica, gas,
teléfono, etc. (ver anexo 3).
Tabla 1. Índice de dureza de las
rocas.
GRADO | DESCRIPCIÓN | IDENTIFICACIÓN DE | RANGO APROX. DE RESISTENCIA A LA | |||||
S1 | Arcilla de muy baja | A presión el puño | < 0.025 | |||||
S2 | Arcilla de baja | A presión el pulgar penetra | 0.025 – 0.050 | |||||
S3 | Arcilla consistente. | Con esfuerzos moderados el | 0.050 – 0.100 | |||||
S4 | Arcilla firme. | Fácilmente indentado por | 0.100 – 0.250 | |||||
S5 | Arcilla muy firme. | Fácilmente indentado por la | 0.250 – 0.500 | |||||
S6 | Arcilla dura. | Indentada con dificultad por | > 0.500 | |||||
R0 | Roca de resistencia | Indentada por la uña del | 0.25 – 1.00 | |||||
R1 | Roca de resistencia muy | Se desmenuza bajo golpes secos con la | 1.00 – 5.00 | |||||
R2 | Roca de resistencia baja. | Con dificultad puede ser descortezada | 5.00 – 25.0 | |||||
R3 | Roca de resistencia media. | No puede ser arañada o descortezada con una | 25.0 – 50.0 | |||||
R4 | Roca resistente. | Para romperlas requieren más | 50.0 – 100 | |||||
R5 | Roca muy resistente. | Para romper la muestra se | 100 – 250 | |||||
R6 | Roca extremadamente | La muestra solo puede ser | > 250 | |||||
Fuente.
http://www.docentes.unal.edu.co/adcorreaa
1.4
SELECCIÓN PRELIMINAR
1.4.1 Herramienta de corte. La selección
de la herramienta de corte es determinada por el material mas
duro que pudiera encontrar la máquina a su paso que es la
roca dura, es por esto que la mayoría de los
cálculos se deben realizar con base en las propiedades de
las rocas duras, teniendo en cue nta sin embargo que se trabaja
principalmente en terrenos blandos.
Se debe optar por una herramienta pequeña que sea
de fácil adquisición y reemplazo ya que el costo de
fabricación de una herramienta grande sería
demasiado elevado por lo que se propone que el sistema de corte
conste de una base que a su vez soporte unos útiles de
corte reemplazables de tal modo que cuando estos se desgasten
sólo sea necesario reemplazarlos para continuar con el
trabajo. En el anexo 4 se ilustran algunas de las posibles
herramientas de perforación a utilizar.
El útil de perforación a utilizar que se
considera más conveniente es el de una herramienta
utilizada en las máquinas rozadoras llamadas picas de
fricción pero que en lugar de trabajar de lado a lado del
túnel perfore directamente hacia delante (ve r anexo
5).
1.4.2 Tamaño. El diámetro exterior
estimado de la microtuneladora es de treinta y cinco
centímetros ya que es una medida que se acomoda al rango
de los tubos más utilizados en las instalaciones de
servicios públicos (ver anexo 3), pero el diámetro
real de la máquina esta sujeto a los componentes que lleve
dentro ya que si por ejemplo, se determina que el motor a
utilizar debe ser de un tamaño mayor o muy cercano a dicho
diámetro se podrían ver afectadas las
dimensiones.
También se considera diseñar una serie de
herramientas de diferentes tamaños para poder efectuar
túneles de diferente tamaño con la misma
microtuneladora.
1.4.3 Sistema de sujeción. El sistema
utilizado es básicamente el mismo de la mayoría de
las tuneladoras comerciales que consiste en una zapatas que
ejercen presión contra la superficie del túnel con
el objetivo de obtener la suficiente adherencia requerida por el
sistema de corte evitando el movimiento de traslación o de
giro de la parte fija de la máquina mientras
efectúa la operación de perforación. Dichas
zapatas se extienden y recogen de manera controlada e
individual con el propósito de ubicar la
máquina para que siga la ruta preestablecida.
La utilización de un sistema hidráulico no
es viable porque este sistema requiere de mecanismos que son de
difícil implementación debido a que sus elevados
costos alejan al proyecto de su objetivo de ser una alternativa
económica, además estos mecanismos no se encuentran
fácilmente en las dimensiones requeridas en esta
aplicación por lo que se sugiere que el mecanismo de
sujeción de la microtuneladora debe constar de tornillos
de potencia debido a su propiedad de autobloqueo generando
estabilidad y reducción en el consumo de energía
aplicada ya que no requiere de esta cuando se mantiene en una
misma posición y engranajes que generan el par de
torsión necesario y se pueden ubicar en diversas
configuraciones lo que permite optimizar los espacios dentro de
la microtuneladora.
1.4.4 Sistema de avance. El sistema de avance
escogido es una adaptación del proceso de avance de un
topo, pero en este se utiliza el sistema de avance de la
herramienta de perforación para lograr también el
avance de la máquina. Es un sistema en el que se busca
reducir componentes utilizando un mecanismo para dos aplicaciones
(ver anexo 6).
1.4.5 Sistema de control. Para controlar la
microtuneladora se decide hacerlo por medio de un instrumento
virtual ya que este tipo de instrumento nos permite efectuar
fácilmente el control remoto de la máquina a
través de un computador con ventanas ilustrativas que
generan un panel gráfico representativo de la
máquina, además con la utilización de un
tablero de mando virtual no se hace necesaria la
construcción de un tablero de control.
Para realizar el programa encargado de controlar la
microtuneladora, se selecciona el lenguaje de programación
gráfica para instrumentación
LABVIEW™ por la facilidad de programación y
visualización debido a las enormes ventajas que este
brinda, entre las que se destacan las interfaces gráficas
de interacción con el usuario, que funciona por eventos
como hacer clic con el ratón, pulsar una tecla, cambiar el
contenido de un cuadro de texto entre otros, lo cual permite una
fácil asimilación de la aplicación por parte
del operario (ver anexo 7).
Como intérprete entre el software de control y
los accionamientos y sensores se hace necesaria la
utilización de una tarjeta de adquisición de datos.
Se propone entonces el diseño de dicha tarjeta a partir de
la utilización de un microcontrolador, un circuito
integrado programable que tiene todos los elementos necesarios
para controlar un sistema y la ventaja de un
reducido tamaño, fácil programación y bajo
costo con relación a otros sistemas como los PLC
(Controladores Lógicos Programables) o tarjetas de
adquisición de datos como las fabricadas por la
National Instruments™.
1.4.6 Extracción de residuos. Se opta por
el sistema clásico de vagón que aunque no
proporciona una extracción continua de los residuos si
tiene una relativa facilidad de fabricación con otros
sistemas utilizados actualmente que aplican lodos de
perforación y bandas transportadoras. No se aplican lodos
de perforación porque las bombas y sus accesorios elevan
demasiado los costos y la instalación de bandas
transportadoras no es factible en un diámetro tan
reducido.
EL PRESENTE TEXTO ES SOLO UNA SELECCION DEL TRABAJO
ORIGINAL.
PARA CONSULTAR LA MONOGRAFIA COMPLETA SELECCIONAR LA OPCION
DESCARGAR DEL MENU SUPERIOR.