
– 1 – Indice Punto 1 Introducción Punto 2 Ecuaciones del
movimiento 15.2.1 Segunda Ley de Newton 15.2.2 Ecuaciones del
movimiento de un punto 15.2.3 Ecuaciones del movimiento de un
sistema de puntos Punto 3 Movimiento rectilíneo Puntos
13.3.1 a 13.3.6 Conocidas x(t), v(t), a(t), a(x), a(v) y a = cte
13.3.7 Análisis gráfico Punto 4 Movimiento
curvilíneo Punto 15.4.1 Movimiento curvilíneo plano
Punto 15.4.2 Movimiento curvilíneo en el espacio

– 2 – 1 Introducción Cuando la resultante del sistema de
fuerzas que se ejerce sobre un cuerpo puntual es nula, el cuerpo
está en equilibrio (reposo o velocidad constante). Cuando
dicha resultante no es nula, el cuerpo se halla animado de
movimiento acelerado. Las fuerzas no equilibradas y los
movimiento que originan constituyen la cinética, tema a
tratar en los dos capítulos que quedan por impartir en
este curso. El movimiento que experimenta un cuerpo cuando
está sometido a un sistema de fuerzas no equilibrado se
puede establecer utilizando tres métodos diferentes: 1.-
Método de fuerza, masa y aceleración. 2.-
Método de trabajo y energía. 3.- Método de
impulso y cantidad de movimiento. El método más
útil para la resolución de un problemq particular
depende de la naturaleza del sistema de fuerzas (constantes o
variables) y de la información que se busca (reacciones,
velocidades, aceleraciones, etc.). En este curso
únicamente se va a desarrollar el primero de los tres
métodos, no porque no sean interesantes los otros dos,
sino porque el primero de ellos es el más utilizado y por
la falta de tiempo para explicar adecuadamente todos ellos.

– 3 – 2 Ecuaciones del movimiento Antiguamente se creía
que un cuerpo en reposo estaba en su estado natural, por lo que
para mantenerlo en movimiento era necesaria una cierta fuerza. La
gran contribución de Newton a la Mecánica fue darse
cuenta de que no era necesaria una fuerza para mantener en
movimiento un cuerpo una vez que se hubiera puesto en movimiento
y que el efecto de una fuerza es alterar una velocidad, no
mantenerla. 2.1 Segunda ley de Newton La primera ley de Newton
atañe a un punto material en reposo o que se mueva con
velocidad constante y la tercera ley de Newton rige la
acción y reacción entre cuerpos que
interactúan. Ambas se han utilizado para desarrollar los
conceptos de Estática. La segunda ley de Newton para el
movimiento, que relaciona el movimiento acelerado de un punto
material con las fuerzas que originan el movimiento, constituye
la base de los estudios de Dinámica. La primera ley de
Newton constituye un caso particular de la segunda. Cuando la
fuerza resultante es nula (R = 0), la aceleración del
punto es nula (a = 0); por lo que el punto estará en
reposo o moviéndose con velocidad constante
(EQUILIBRIO).

– 4 – Si sobre una partícula se ejerce una fuerza
exterior, aquella se acelerará en la dirección y
sentido de la fuerza y el módulo de la aceleración
será directamente proporcional a la fuerza e inversamente
proporcional a la masa de la partícula.
Matemáticamente: El enunciado moderno de 2ª ley de
Newton es: donde: a es la aceleración de la
partícula. F es la fuerza que se ejerce sobre la
partícula. m es la masa de la partícula. k es una
constante de proporcionalidad en función de las unidades
Esta ecuación, válida tanto para fuerzas constantes
como para fuerzas que varíen con el tiempo (en
módulo o dirección), nos dice que los
módulos de F y a son proporcionales y que los vectores F y
a tienen la misma dirección y sentido (ya que m es un
escalar positivo). Un sistema para el cual k = 1 tendrá
unidades cinéticas coherentes (Ej.- SI). La unidad de
fuerza (Newton) es la fuerza que aplicada a una masa de 1 kg le
comunica una aceleración de 1 m/s2. En el sistema SI, el
peso W de un cuerpo (fuerza de la gravedad) vale:

– 5 – 2.2 Ecuaciones del movimiento de un punto Cuando sobre un
punto material se ejerce un sistema de fuerzas F1, F2, F3,
…Fn, su resultante es una fuerza R cuya recta soporte pasa
por el centro de masa del punto, ya que todo sistema de fuerzas
que se ejerzan sobre un punto debe constituir un sistema de
fuerzas concurrentes. El movimiento del punto material viene
regido por la 2ª ley de Newton así: En función
de sus componentes cartesianas rectangulares: Cuando se utilice
alguna de estas ecuaciones del movimiento de un punto,
deberá establecerse un convenio de signos.

– 6 – 2.3 Ecuaciones del movimiento de un sistema de puntos Las
ecuaciones del movimiento de un sistema de puntos materiales se
pueden obtener aplicando la 2ª ley de Newton a cada uno de
los puntos pertenecientes al sistema. Ejemplo.- consideremos el
conjunto de n partículas representado en la figura. La
partícula i-ésima tiene una masa mi y su
situación se especifica respecto a un sistema de ejes de
referencia adecuado utilizando el vector de posición ri.
Cada partícula del sistema puede estar sometida a un
sistema de fuerzas exteriores de resultante Ri y a un sistema de
fuerzas interiores fi1, fi2, fi3, …fin,. Las fuerzas
interiores se deben a las interacciones elásticas entre
partículas y a efectos eléctricos o
magnéticos. La fuerza interior ejercida por la
partícula pj sobre la partícula pi se representa
por fij. Aplicando la 2ª ley de Newton a la partícula
i-ésima se tiene:

– 7 – En la suma de fuerzas interiores, fij es nula porque la
partícula pi no se ejerce fuerza sobre sí misma. Si
una partícula pj ejerce una fuerza fij sobre la
partícula pi, la 3ª ley de Newton nos dice que la
partícula pi ejercerá sobre la pj una fuerza fji de
igual recta soporte y mádulo que fij pero de sentido
opuesto. Sumando las ecuaciones del movimiento correspondiente a
las n partículas del sistema se obtiene una
ecuación del movimiento para el sistema. Así pues,
Esta ecuación nos indica que la resultante R del sistema
exterior de fuerzas aplicadas que se ejercen sobre el sistema de
partículas es igual a la resultante de los vectores de
inercia ma (denominados a veces fuerzas de inercia) de las
partículas del sistema. (1)

– 8 – Si consideramos el CDM del sistema de puntos materiales se
puede escribir la ecuación anterior de otra forma. El CDM
del sistema es el punto G definido por el vector de
posición rG que satisface Derivando respecto al tiempo la
ecuación anterior tenemos Combinando las ecuaciones (1) y
(2) tenemos: (2) Estas ecuaciones constituyen el “principio
del movimiento del centro de masa” de un sistema de puntos
materiales. Como estas expresiones son formalmente iguales a las
obtenidas para un punto material único, un sistema de
puntos materiales se puede tratar como un punto material
único, situado en el CDM G, si se supone que se aplica una
fuerza igual a la resultante R soportada por una recta que pase
por G. de hecho todo cuerpo puede ser considerado como punto
material al aplicar la ecuación anterior.

– 9 – 3 Movimiento rectilíneo En el tema 13 se
describió la Cinemática del punto material animado
de movimiento rectilíneo. Si orientamos el eje x de manera
que coincida con la trayectoria del movimiento tendremos que : En
el caso del movimiento rectilíneo a lo largo del eje x,
las ecuaciones de la Cinética se reducen a: En este tipo
de movimiento, podemos prescindir de la notación vectorial
y utilizar el signo de una magnitud para indicar si el sentido de
una magnitud vectorial es el del semieje positivo o el del
negativo del eje x. Existen 4 tipos de problemas referentes al
movimiento rectilíneo: F = constante. F = función
del tiempo. F = función de la posición. F =
función de la velocidad.

– 10 – Primer caso: F = constante. La 2ª ley da: Integrando
2 veces respecto al tiempo se tiene: Las dos C se pueden
determinar a partir de las condiciones iniciales del problema.
Segundo caso: F = función del tiempo. La 2ª ley da:
Se puede integrar 2 veces respecto al tiempo la ecuación
anterior para obtener las expresiones de la velocidad y de la
posición. Las dos constantes que aparecen se pueden
determinar a partir de las condiciones iniciales del problema.
Tipos de problemas (movimiento rectilíneo): * *

– 11 – Si observamos que: Con lo que de donde sacamos integrando,
en función de Como podemos volver a integrar para obtener
una relación entre x y t. Las dos constantes que aparecen
se pueden determinar a partir de las condiciones iniciales del
problema. Cuarto caso: F = función de la velocidad. La
2ª ley da: Las dos constantes que aparecen se pueden
determinar a partir de las condiciones iniciales del problema.
Tercer caso: F = función de la posición. La 2ª
ley da: * *

– 12 – PROBLEMA 2

– 13 – PROBLEMA 4
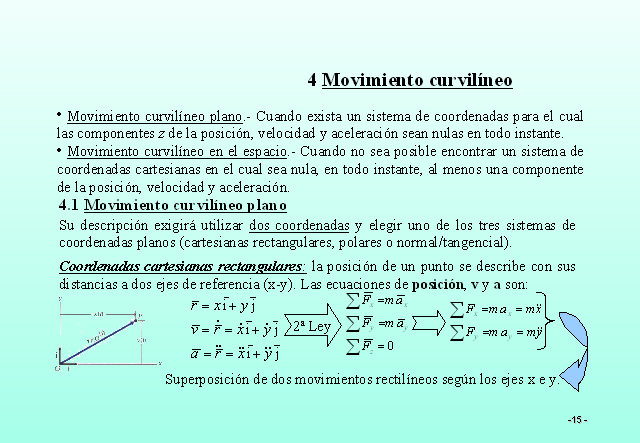
– 14 – 4 Movimiento curvilíneo Su descripción
exigirá utilizar dos coordenadas y elegir uno de los tres
sistemas de coordenadas planos (cartesianas rectangulares,
polares o normal/tangencial). Coordenadas cartesianas
rectangulares: la posición de un punto se describe con sus
distancias a dos ejes de referencia (x-y). Las ecuaciones de
posición, v y a son: 4.1 Movimiento curvilíneo
plano Movimiento curvilíneo plano.- Cuando exista un
sistema de coordenadas para el cual las componentes z de la
posición, velocidad y aceleración sean nulas en
todo instante. Movimiento curvilíneo en el espacio.-
Cuando no sea posible encontrar un sistema de coordenadas
cartesianas en el cual sea nula, en todo instante, al menos una
componente de la posición, velocidad y aceleración.
2ª Ley Superposición de dos movimientos
rectilíneos según los ejes x e y.

– 15 – Coordenadas polares: la posición de un punto se
describe utilizando una distancia r a un punto fijo y un
desplazamiento angular ? relativo a una recta fija. Los vectores
unitarios er y e? están dirigidos el primero radialmente y
en sentido de alejamiento del punto fijo y el segundo
perpendicular al primero y en el sentido de los ángulos ?
crecientes. Las ecuaciones para la posición, velocidad y
aceleración son: 2ª Ley Ecuaciones escalares

– 16 – 4.2 Movimiento curvilíneo en el espacio Su
descripción exigirá utilizar tres coordenadas y
elegir uno de los tres sistemas de coordenadas espaciales
(cartesianas rectangulares, cilíndricas o
esféricas). Coordenadas cartesianas rectangulares: este
sistema es una extensión directa del sistema rectangular
empleado en los problemas planos. Las ecuaciones de
posición, velocidad y aceleración son: 2ª Ley
Ecuaciones escalares

– 17 – Este sistema es una extensión directa del sistema
de coordenadas polares empleado en los problemas planos. Las
ecuaciones de posición, velocidad y aceleración
son: 2ª Ley Ecuaciones escalares Coordenadas
cilíndricas:

– 18 – PROBLEMA 7

– 19 – PROBLEMA 8