
Motivación
Los datos a menudo son dados para valores discretos a lo largo de un continuo
Sin embargo, se puede requerir una estimación en puntos entre los valores discretos
En este tema se describirán métodos numéricos para el ajuste de curvas a tales datos para obtener estimaciones intermedias
Además, se puede requerir una versión simplificada de una función en un número de valores discretos dentro de un intervalo de interés. A partir del ajuste a estos valores se puede obtener una función más simple que la función original

Motivación
Existen dos procedimientos generales para el ajuste de curvas, cuya aplicación depende del grado de error asociado con los datos
Cuando los datos exhiben un grado significativo de error o ruido, se prefiere ajustar una curva que representa la tendencia general de los datos (método APROXIMANTE)
Cuando los datos son muy precisos, se ajusta una curva o serie de curvas que pasen por cada uno de los puntos (método INTERPOLANTE)La estimación de valores entre puntos discretos bien conocidos es llamada interpolación
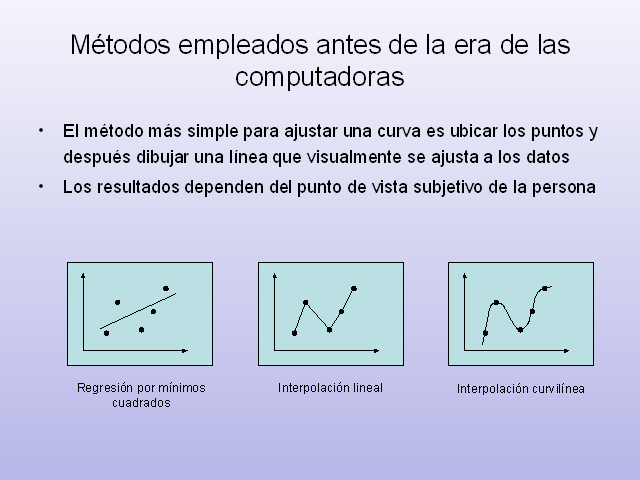
Métodos empleados antes de la era de las computadoras
El método más simple para ajustar una curva es ubicar los puntos y después dibujar una línea que visualmente se ajusta a los datos
Los resultados dependen del punto de vista subjetivo de la persona
Regresión por mínimos cuadrados
Interpolación lineal
Interpolación curvilínea

Ajuste de curvas y práctica de la ingeniería
Determinar valores intermedios a partir de datos tabulados
Desarrollo de relaciones predictivas a partir de datos experimentales
Análisis de tendencia: se usan para predecir valores de la variable dependiente. Ya sea, extrapolación más allá de los límites de los datos observados o interpolación dentro del rango de los datos
Prueba de hipótesis: aquí, un modelo matemático existente se compara con los datos medidos. Si se desconocen los coeficientes del modelo, se determinan los valores que mejor ajusten a los datos observados. Si se dispone de los coeficientes del modelo se comparan las predicciones del modelo con las observaciones para probar que tan adecuado es
Derivar funciones simples con el fin de aproximar funciones complicadas

Regresión por mínimos cuadrados
Cuando los datos exhiben un grado significativo de error, se ajusta una curva que represente la tendencia general de los datos
Una forma de hacerlos es determinando la curva que minimice la diferencia entre los puntos y la curva

Regresión por mínimos cuadrados
El análisis de regresión es una metodología que estudia la asociación cuantitativa entre una variable dependiente y, con otras m variables de predicción zj
Donde se supone la existencia de n valores de la variable dependiente yi, observadas bajo un conjunto de condiciones experimentales xi, que forman las variables de predicción
Para cada observación i se formula una ecuación lineal de la forma
donde los errores ?i son independientes con valor esperado igual a cero y varianza ?2

Regresión por mínimos cuadrados
La ecuación lineal anterior puede ser expresada en forma matricial como,
donde y es un vector columna de las n observaciones yi, Z es la matriz n ? m de las observaciones zij de las variables de predicción
Si el modelo incluye una constante (por ejemplo, si el modelo es: y = ß0 + ß1 z1 + ß2 z2), la matriz Z debe tener 3 columnas, donde su primer columna está formada por unos y las siguientes por los valores de z1 y z2

Regresión por mínimos cuadrados
Supuesta la validez del modelo, se estiman, por mínimos cuadrados, los parámetros ?j y la varianza ?2
La solución por el método de mínimos cuadrados consiste en minimizar en ? la función
Derivando esta ecuación con respecto de ? e igualando a cero
Si las columnas de la matriz Z son independientes, ZTZ es invertible y la solución está dada por
Los parámetros estimados son insesgados y de varianza mínima por lo que se consideran óptimos

Regresión por mínimos cuadrados
Una vez estimados los ?j, pueden hallarse los valores ypi estimados por el modelo, asociados al conjunto de valores zij de las variables de predicción
donde P es la matriz de proyección de un vector cualquiera sobre el espacio de las columnas de Z
Para toda nueva observación, znew, su predicción es implemente,

Regresión por mínimos cuadrados
El mínimo de la suma de cuadrados de los errores es
El estimador de la varianza ?2 está dado por el promedio de los errores, el error cuadrático medio, MSE donde se divide por n – m para obtener una estimación insesgada de ?2
La matriz de covarianza del estimador es,La varianza de cada parámetro individual se encuentra en la diagonal de
Regresión por mínimos cuadrados
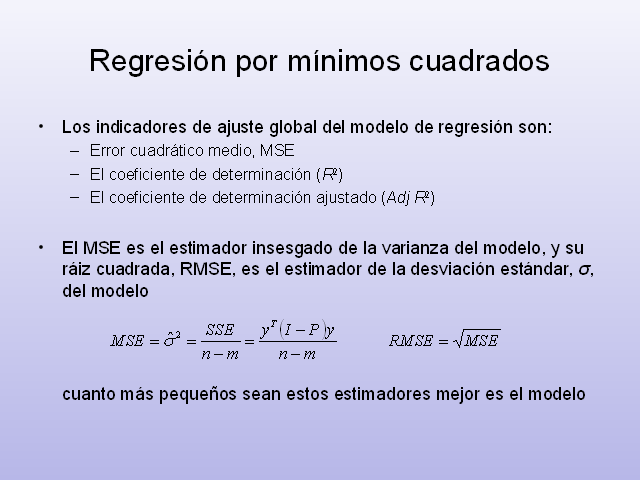
Los indicadores de ajuste global del modelo de regresión son:
Error cuadrático medio, MSE
El coeficiente de determinación (R2)
El coeficiente de determinación ajustado (Adj R2)
El MSE es el estimador insesgado de la varianza del modelo, y su ráiz cuadrada, RMSE, es el estimador de la desviación estándar, s, del modelo
cuanto más pequeños sean estos estimadores mejor es el modelo

Regresión por mínimos cuadrados
El coeficiente de determinación, R2, explica la relación entre la suma de cuadrados que expresa el modelo y la suma de cuadrados total
donde, la suma de cuadrados total corregida de las observaciones respecto de la media esta dada por,
Este indicador tiene el defecto de no penalizar el exceso de variables, ya que cada vez que se agrega una nueva variable al modelo, el R2 crece sin que esto signifique que la nueva variable aporte algo al modelo
Se cumple que 0 = R2 = 1, cuando el modelo aproxima bien, R2 es próximo a 1

Regresión por mínimos cuadrados
El coeficiente de determinación ajustado, AdjR2, penaliza el aumento del número m de variables
Cuando el modelo ajusta bien, el AdjR2, debe ser próximo a 1

Regresión por mínimos cuadrados
Ejemplo:
Ajuste de modelos lineal, cuadrático y cúbico a datos de Hermite por regresión por mínimos cuadrados

Regresión por mínimos cuadrados
Ajustando un modelo más complejo se logra mejor ajuste de los datos

Interpolación de polinomios
Formula general para un polinomio
Para n+1 puntos, hay uno y sólo un polinomio de orden n que pasa a través de todos los puntos
Polinomio de primer orden (línea recta) ? conecta dos puntos
Polinomio de segundo orden (parábola) ? conecta tres puntos
La interpolación polinomial consiste en determinar el único polinomio de n-ésimo orden que ajuste n+1 puntos
Luego este polinomio permite calcular valores intermedios
Existen dos formas matemáticas de expresar este polinomio
Polinomio de Newton
Polinomio de Lagrange

Diferencia finita de Newton para la interpolación de polinomios
Interpolación lineal: realiza la estimación entre dos puntos con una línea rectamediante triángulos semejantesotra forma
(Gp:) x0
(Gp:) x
(Gp:) x1
(Gp:) f(x0)
(Gp:) f1(x)
(Gp:) f(x1)
Si x = x0 ?
Si x = x1 ?
? Aproximación por diferencias finitas de la primera derivada

Diferencia finita de Newton para la interpolación de polinomios
Interpolación cuadrática: si tres puntos de los datos están disponibles se puede ajustar un polinomio de 2do grado
Si x = x0 ?
Si x = x1 ?
? Aproximación por diferencias finitas de la primera derivada
Si x = x2 ?
? Aproximación por diferencias finitas de la 2da derivada

Forma general de la interpolación de polinomios de Newton
Para ajustar un polinomio de n-ésimo orden a n+1 datoslos coeficientes son:
? Donde las evaluaciones de la función entre corchetes son diferencias finitas divididas

Forma general de la interpolación de polinomios de Newton
La primera diferencia finita se representa como
La segunda diferencia finita, como la diferencia de las dos primeras
La n-ésima diferencia finita es
Nótese, que no es necesario que los datos estén igualmente espaciados, o que los valores de la abcisa estén en orden ascendente

Forma general de la interpolación de polinomios de Newton
Ejemplo: Utilice un polinomio de Newton de 3er orden para interpolar el valor en x = 2

Error de la interpolación con polinomios de Newton
El polinomio de Newton de orden n es de la forma
La estructura del polinomio de Newton es similar a la de la serie de Taylor
De manera similar al caso de la serie de Taylor se puede obtener una formulación para el error de los polinomios de Newton
Para la serie de Taylor
Para polinomio de newton de orden n

Error de la interpolación con polinomios de Newton
Una formulación alternativa está disponible y no requiere el conocimiento de la función
Esta formula no puede resolverse porque contiene la incógnita f(x), sin embargo, si se dispone de un dato adicional puede usarse para estimar el error
El error estimado para el polinomio de n-ésimo orden es equivalente a la diferencia entre la estimación de (n+1)-ésimo orden y la de n-ésimo orden

Seudo código para el método de interpolación por polinomios de Newton
SUBROUTINE NewtInt (x,y,n,xi,yint,ea)
LOCAL fddn,n
DO i = 0, n
Fddi,0= yi
END DO
DO j = 1, n
DO i = 0, n-j
fddi,j = (fddi+1,j – fddi,j-1)/(xi+j – xi)
ND DO
END DO
xterm = 1
yint0 = fdd0,0
DO order = 1, n
xterm = xterm*(xi – xorder-1)
yint2 = yintorder-1 + fdd0,order*xterm
eaorder-1 = yint2 –yintorder-1
yintorder = yint2
END DO
END NewtInt

Interpolación de polinomios de Lagrange
Este método es una reformulación del polinomio de Newton que evita el cálculo por diferencias finitas
Los polinomios de Lagrange se pueden expresar comodonde,
Polinomio de orden n = 1 ?
Polinomio de orden n = 2

Interpolación de polinomios de Lagrange
La estimación del error en la interpolación con los polinomios de Lagrange esta dada por
Sin embargo, como este método no usa las diferencias finitas, no es práctico hacer este cálculo
Por eso se prefiere usar polinomios de Lagrange cuando se conoce a priori el orden del polinomio
Y se usan los polinomios de Newton para cálculos exploratorios, ya que este método proporciona información respecto al comportamiento de los polinomios de diferente orden

Seudo código para el método de interpolación por polinomios de Lagrange
FUNCTION Lagrng(x,y,n,x)
sum = 0
DO i = 0, n
product = yi
DO j = 0, n
IF i ~= j THEN
product = product*(x – xj)/(xi – xj)
END IF
END DO
sum = sum + product
END DO
Lagrng = sum
END Lagrng

Coeficientes de un polinomio de interpolación
Un método directo para calcular los coeficientes de un polinomio de interpolaciónse basa en el hecho de que n+1 puntos se requieren para determinar los n+1 coeficientes
Se puede usar la solución de un sistema de ecuaciones algebraicas simultáneas para calcular los coeficientes

Coeficientes de un polinomio de interpolación
Por ejemplo, se quiere calcular los coeficientes deSe requieren tres puntos (x0,f(x0)), (x1,f(x1)) y (x2,f(x2)), sustituyendo cada uno en el polinomio para dar
Se debe tener precaución con el orden
Los sistemas como estos están notoriamente mal condicionados
Los coeficientes pueden ser altamente inexactos, en particular para n grandes

Interpolación segmentaria (SPLINES)
En la sección anterior se usó polinomios de n-ésimo orden para interpolar n+1 puntos
Esta curva podría capturar todas las curvaturas sugeridas por los puntos
Hay casos en los que estas funciones pueden llevar a resultados erróneos debido a errores de redondeo y puntos lejanos
Una alternativa es aplicar polinomios de orden inferior a subconjuntos de datos
A estos se les llama funciones segmentarias
Estas se pueden construir de tal forma que las conexiones entre las ecuaciones cúbicas adyacentes resultan visualmente suaves

Segmentarias cuadráticas
Para asegurar que las derivadas m-ésimas sean continuas en los nodos, se debe usar una segmentaria del al menos m+1 orden
En la práctica se usan con más frecuencia segmentarias cúbicas para asegurar derivadas continuas de 1ro y 2do orden
El objetivo de las segmentarias cuadráticas es obtener un polinomio de 2do orden para cada intervalo i entre datos

Segmentarias cuadráticas
Para n+1 datos (i = 0,1,2,…n) existen n intervalos
En consecuencia , 3n constantes desconocidas (a, b y c)
Se requieren 3n ecuaciones:
Los valores de la función de polinomios adyacentes deben ser iguales a los nodos interiorespara i = 2 a nComo solo se usan para puntos interiores, da un total de 2n-2 ecuaciones
(Gp:) x0
i=0
(Gp:) x1
i=1
(Gp:) x3
i=3
(Gp:) x2
i=2
(Gp:) Intervalo1
(Gp:) Intervalo2
(Gp:) Intervalo3

Segmentarias cuadráticas
Las 1ra y ultima funciones deben pasar por los puntos extremos2 ecuaciones adicionales
Las 1ras derivadas en los nodos interiores deben ser igualespara i = 2 a nn-1 ecuaciones
Para un total de 2n-2 + 2 + n-1 = 3n-1
(Gp:) x0
i=0
(Gp:) x1
i=1
(Gp:) x3
i=3
(Gp:) x2
i=2
(Gp:) Intervalo1
(Gp:) Intervalo2
(Gp:) Intervalo3
Falta una ecuación!!

Segmentarias cuadráticas
A menos que se tenga información
adicional acerca de la función o sus
derivadas, se debe tomar una
selección arbitraria para calcular las
constantes
Suponga que en el 1er punto la 2da derivada es cerolo que indica que los dos primeros puntos se conectan con una línea recta
(Gp:) x0
i=0
(Gp:) x1
i=1
(Gp:) x3
i=3
(Gp:) x2
i=2
(Gp:) Intervalo1
(Gp:) Intervalo2
(Gp:) Intervalo3

Segmentarias cuadráticas
Ejemplo: Ajustar por segmentarias cuadráticas los datos de la tabla. Interpole el valor en x = 5
1. Los valores de la función de polinomios adyacentes deben ser iguales a los nodos interiores

Segmentarias cuadráticas
Ejemplo: Ajustar por segmentarias cuadráticas los datos de la tabla. Interpole el valor en x = 5
2. Las 1ra y ultima funciones deben pasar por los puntos extremos

Segmentarias cuadráticas
Ejemplo: Ajustar por segmentarias cuadráticas los datos de la tabla. Interpole el valor en x = 5
3. Las 1ras derivadas en los nodos interiores deben ser iguales
4. Suponga que en el 1er punto la 2da derivada es cero

Segmentarias cuadráticas
Ejemplo: El problema se reduce a resolver un sistema de ecuaciones lineales

Segmentarias cuadráticas
Ejemplo: Resolviendo el sistema de ecuaciones se obtiene
Las cuales pueden sustituirse en las ecuaciones cuadráticas originales para determinar la ecuación para cada intervalo

Segmentarias cúbicas
El objetivo de las segmentarias cúbicas es obtener un polinomio de 3er orden para cada intervalo entre los puntos
Para n+1 datos (i=0,1,2,…,n) existen n intervalos, 4n incógnitas constantes para evaluar
Se requieren 4n ecuaciones para evaluar las incógnitas

Segmentarias cúbicas
Los valores de la función deben ser iguales en los puntos interiores (2n-2) ecuaciones
Las primera y última funciones deben pasar por los puntos extremos (2 ecuaciones)
Las 1ras derivadas en los puntos interiores deben ser iguales (n-1 ecuaciones)
Las 2das derivadas en los puntos interiores deben ser iguales (n-1 ecuaciones)
Las 2das derivadas en los puntos extremos son cero (2 ecuaciones)
2n – 2 + 2 + n -1 + n – 1 + 2 = 4n
La última condición indica que la función se vuelve una línea recta en los puntos extremos

Segmentarias cúbicas
Existe una técnica alterna que requiere sólo la solución de n-1 ecuaciones
Se basa en que la 2da derivada dentro de cada intervalo es una línea recta y se obtiene la siguiente ecuación cúbica para cada intervalo
Esta ecuación tiene dos incógnitas, las 2das derivadas en los extremos de cada intervalo

Segmentarias cúbicas
Estas incógnitas se pueden evaluar mediante la siguiente ecuación
Si esta ecuación es descrita para todos los nodos interiores, resulta n-1 ecuaciones simultáneas con n-1 incógnitas (porque las 2das derivadas en los puntos extremos son cero ? segmentaria natural)
Además, el sistema de ecuaciones será tridiagonal ? se puede usar el algoritmo de Thomas (TDMA)