
Otros Ejemplos
Sistemas de Control de Tráfico
Sistemas Biológicos (Ecuaciones de Volterra ampliadas)
Sistemas de Control de Inventario
Sistemas Empresariales

Elementos Básicos del Diseño de Sistemas de Control
Requisitos Generales de los Sistemas de Control
Todo Sistema de Control debe ser Estable. (absoluta vs. Relativa), velocidad de respuesta, reducir errores razonablemente.
Teoría de Control Moderna (TCM) vs. Teoría del Control Clásico (TCC).
La TCC utiliza extensamente la función de transferencia. Realiza el análisis en el dominio de s y/o el dominio de la frecuencia.
LA TCM se basa en el concepto de Espacio de Estado, utiliza extensamente el análisis vectorial – Matricial

Elementos Básicos del Diseño de Sistemas de Control
La TCC Brinda buenos resultados para sistemas de control de una entrada y una salida, siendo inútil para sistemas de múltiples entradas y salidas.
LA TCM es buena para sistemas con Múltiples entradas y m múltiples salidas.
La TCC utiliza los métodos de control convencional (PID, Lugar de Raíces, Respuestas de Frecuencia), están basados más en la comprensión física que matemática.
La TCM utiliza más métodos (Espacio de Estados) con fuerte análisis matemático, siendo más difíciles de entender que el clásico

Elementos Básicos del Diseño de Sistemas de Control
Modelado Matemático
Componentes de un SC (Electromecánicos, hidráulicos, neumáticos, electrónicos, etc.), los cuales se reemplazan con modelos matemáticos.
No deben ser muy complicados ni muy simples, representando los elementos esenciales de tal forma que sus predicciones sean bastante precisas.
Se deben tener en cuenta los isomorfismos.
En Ingeniería del Control se usan ecuaciones diferenciales parciales invariantes en el tiempo, funciones de transferencia y ecuaciones de estado para modelos matemáticos de sistemas lineales invariantes en el tiempo.
Las relaciones entradas- salida no lineales se linealizan en la vecindad de los puntos de operación.

Elementos Básicos del Diseño de Sistemas de Control
Análisis y Diseño de sistemas de Control.
Análisis: La investigación bajo condiciones específicas del comportamiento de un sistema, cuyo modelo matemático se conoce.
Análisis de respuesta transitoria: La determinación de respuesta de una planta a señales y perturbaciones de entrada.
Análisis de Respuesta en Estado Estacionario: La determinación de la respuesta tras la desaparición de la respuesta transitoria.
Diseño: Hallar un sistema que cumpla la tarea dada.
Síntesis: Encontrar, mediante un procedimiento directo, un sistema de control que se comporte de un modo específico.

Elementos Básicos del Diseño de Sistemas de Control
Método básico de diseño de Control.
Es necesaria la utilización de procedimientos de tanteo, por las diversas perturbaciones en los sistemas los cuales incluyen no linealidades
Índice de Comportamiento: Es una medida cuantitativa del comportamiento, que indica la desviación respecto al comportamiento ideal. Se determina por los objetivos del S.C. Ej. Integral de error a minimizar.
Ley de Control: La especificación de la señal de control durante el intervalo de tiempo de tiempo operativo. Se busca determinar la ley de control óptimo.

Elementos Básicos del Diseño de Sistemas de Control
Pasos de Diseño
Dada una planta industrial, primeramente se deben elegir sensores y actuadores a apropiados.
Construir Modelos Matemáticos apropiados de la planta.
Diseñar un controlador de tal modo que el sistema de lazo cerrado satisfaga las especificaciones dadas.
El controlador es una solución a la versión matemática del problema de diseño.
Simular el modelo en una computadora para verificar el comportamiento del sistema, en respuesta a diversas señales y perturbaciones.
Con los resultados de simulación se debe rediseñar el sistema y completar el análisis correspondiente.
Construir un prototipo del sistema físico.
Probar el Prototipo hasta cumplir con los requisitos.

Modelado Matemático
SubRepresentación de Sistemas Dinámicos en Espacio de Estados

Modelos
Mentales
Lingüísticos
Gráficos
Matemáticos
Software

Construcción de los Modelos Matemáticos

Modelos Matemáticos

Conceptos Matemáticos Preliminares
Propiedades de la Transformada de Laplace.
Método Operacional para resolver ecuaciones diferenciales lineales (EDL).
La EDL se transforma en una operación algebraica en función de una variable compleja s, se resuelve la f(s) y luego se aplica la transformada inversa de Lapalace.
Laplace se puede utilizar en técnicas de análisis gráfico para predecir el funcionamiento del sistema sin resolver las EDL.
Resolviendo las EDL se obtienen componentes de estado transitorio y estacionario en la solución simultáneamente.

Conceptos Matemáticos Preliminares
Variables Complejas y Función Compleja.

Conceptos Matemáticos Preliminares
Teorema de Euler

Conceptos Matemáticos Preliminares
Transformada de Laplace

Conceptos Matemáticos Preliminares
Aplicar Laplace a las funciones: (Ejemplo)

Función de Transferencia
Permite caracterizar las relaciones entre la entrada y la salida de componentes o de sistemas que pueden describirse por ecuaciones diferenciales lineales, invariantes en el tiempo.
Def.:La función de transferencia de un sistema de ecuaciones diferenciales lineales invariante en el tiempo, se define como la relación entre la transformada de Laplace de salida (función respuesta) y la transformada de Laplace de Entrada (función excitación), bajo la suposición que todas las condiciones iniciales son cero.

Función de Transferencia
Utilizando este concepto de función de transferencia, se puede representar la dinámica de un sistema por ecuaciones algebraicas en s. Si la potencia más alta de s en el denominador de la función de transferencia es igual a n, se dice que el sistema es de orden n.
El concepto de función de transferencia esta limitado a sistemas de ecuaciones diferenciales lineales invariantes en el tiempo.
La FT es un método operacional apara expresar la ecuación diferencial que relaciona la variable de salida con la variable de entrada.
La FT es una propiedad de un sistema en sí, independiente de la magnitud y naturaleza de la entrada o función impulsora.

Función de Transferencia
La FT incluye las unidades necesarias para relacionar la entrada con la salida: no obstante, no brinda ninguna información con respecto a la estructura física del sistema.
Si se conoce la FT de un sistema, se puede estudiar la salida o respuesta para diversas formas de entradas con el objetivo de lograr una comprensión de la naturaleza del sistema.
Si se Conoce la FT de un sistema, se puede establecer experimentalmente introduciendo entradas conocidas y estudiando la respuesta o salida del sistema, brindando la descripción de las características dinámicas del sistema.

Sistema de Representación de un Sistema de Control
Diagrama de bloques:
G(s)
Bloque Funcional
Punto de Suma
+
–
(Gp:) G(s)
(Gp:) +
(Gp:) –
(Gp:) R(s)
(Gp:) E(s)
(Gp:) C(s)
B(s)
G(s)
(Gp:) +
(Gp:) –
R(s)
E(s)
C(s)
H(s)
Diagrama de Bloques de un Sistema de Lazo Cerrado
Señales
x
y=G(s)*x
Punto de Bifurcación

Funciones de Transferencia del Ejemplo anterior
Función de Transferencia
De Lazo Abierto:
Función de Transferencia
Directa:
Función de Transferencia
De Lazo Cerrado:
Función de Transferencia
De Lazo Cerrado con Amplificación
De la Señal de Entrada K:

Representación de un SLC sometido a perturbación
Se pueden considerar las respuestas de las entradas por separado y luego sumarlas.
B(s)
G1(s)
(Gp:) +
(Gp:) –
R(s)
E(s)
C(s)
H(s)
+
+
N(s)
G2(s)
Perturbación

Representación de un SLC sometido a perturbación

Procedimientos para trazar un Diagrama de Bloques
Escribir las ecuaciones que describen el comportamiento dinámico de cada componente.
Tomar las transformadas de Lapace de éstas ecuaciones, suponiendo condiciones iniciales cero. Cada transformada se representa individualmente en forma de Bloque.
Se integran los elementos en un Diagrama de Bloques completo.

Conversión de Diagramas de Bloques
Suma de Señales:
Conexión en Cascada:
=
Conexión en Paralelo:

Conversión de Diagramas de Bloques
Retroalimentación:
=
Traslado del Sumador:
Traslado del Punto de Salida:

Ejemplo 1: DB de Circuito
R
i
ei
e0
Laplace:
C
–
+

Ejemplo 1: DB Circuito
1/R
(Gp:) +
(Gp:) –
Ei(s)
E(s)
I(s)
E0(s)
(1)
1/Cs
I(s)
E0(s)
(2)
1/R
(Gp:) +
(Gp:) –
Ei(s)
E(s)
I(s)
E0(s)
(3)
1/Cs
E0(s)

Método del Espacio de Estados
Teoría de Control Moderna (1960) Concepto de Estado.
Teoría de Control Moderna vs. Teoría de Control Clásica.
Multivariable vs. Una entrada una Salida
Dominio en el tiempo vs. Dominio en Frecuencia Complejas.
Estado: Es el conjunto más pequeño de variables (de Estado) tales que el conocimiento de esas variables en t=t0, conjuntamente con el conocimiento de la entrada para t >= t0, determinan completamente el comportamiento del sistema en cualquier tiempo t >= t0.
Variables de Estado: Son las variables que constituyen el conjunto más pequeño de variables que determinan el estado de un sistema dinámico.

Método del Espacio de Estados
Vector de Estado: Si se requieren n variables para describir el comportamiento de un sistema dado, se puede considerar a esas n variables como elementos de un vector X. Determinando el estado del sistema dado una entrada U(t) t>=0.
Espacio de Estado: Espacio n-dimensional cuyos ejes coordenados, consiste en el eje X1, X2, … Xn,.
Ecuaciones de Espacio de Estado: Se manejan tres tipos de variables (Entrada, Salida, Estado)
SISO
MIMO

Método del Espacio de Estados
Las ecuaciones empleadas son de primer orden, que operan sobre vectores de estado:
u es un vector que contiene cada una de las p entradas al sistema,
y es un vector que contiene cada una de las q salidas del sistema,
x es un vector que contiene cada una de las n variables de estado
del sistema, es decir:

Método del Espacio de Estados
Estudiaremos sistemas dinámicos lineales invariantes en el tiempo, de múltiples entradas y múltiples salidas. Si el sistema es continuo, su modelo corresponderá a las ecuaciones Matriciales:
Las Matrices deben ser
de tamaño adecuado:
A = Matriz de Estado
B = Matriz de Entrada
C = Matriz de Salida
D = Matriz de Transmisión Directa
Ecuación de Estado
Ecuación de Salida

Método del Espacio de Estados
Función de Transferencia
De un Integrador

Ejemplo 1: Sistema Eléctrico – Circuito RLC
Aplicando la Leyes de Kirchhoff:

Ejemplo 1: Sistema Eléctrico – Circuito RLC
Organizando las ecuaciones:
En forma matricial:
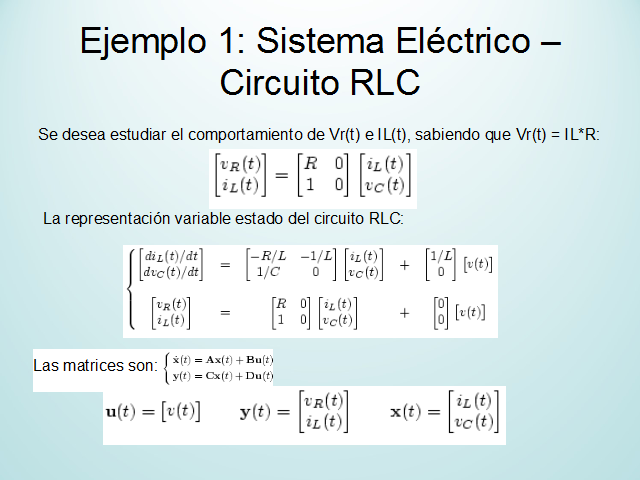
Ejemplo 1: Sistema Eléctrico – Circuito RLC
Se desea estudiar el comportamiento de Vr(t) e IL(t), sabiendo que Vr(t) = IL*R:
La representación variable estado del circuito RLC:
Las matrices son:

Ejemplo 2:Motor Eléctrico Controlado por campo
Motor de corriente continua controlado por campo, con corriente de armadura
Constante. Mueve una carga J, Coeficiente de fricción viscosa B con velocidad
angular w(t).
La ecuación es:

Ejemplo 2:Motor Eléctrico Controlado por campo
Las Ecuaciones son:
Matricialmente:

Ejemplo 2:Motor Eléctrico Controlado por campo
Representación 1 Espacio Estado: Salida w(t)
Representación 1 Espacio Estado: Variables de estado T(t) y W(t)

Representación Espacio Estado a Partir de Ecuaciones Diferenciales – Salida sin derivadas
Método sencillo para sistemas SISO:
El sistema queda unívocamente determinado si se conocen las condiciones
Iniciales, así:

Representación Espacio Estado a Partir de Ecuaciones Diferenciales – Salida sin derivadas
Así, puede escribirse la ED como:
Matricialmente:

Representación Espacio Estado a Partir de Ecuaciones Diferenciales – Salida con derivadas
Colocar método aquí

Relación entre Funciones de Transferencia y Variables de estado
Sistemas SISO la función de transferencia es:
Donde A, B, C y D son matrices de:
I es la matriz idéntica correspondiente
Ejemplo: Se tiene de un Sistema Mecánico las siguientes matrices:

Relación entre Funciones de Transferencia y Variables de estado

Controlabilidad
Se dice que el estado Xi es controlable en t0 cuando es posible transformar el estado inicial Xi(t0) en el estado deseado Xi(tf) en un tiempo finito, por medio de la selección apropiada de las entradas ?t en el intervalo [t0,tf].
Si todos los estados del sistema son controlables en t0, se dice que el sistema es “completamente controlable” en t0.

Observabilidad
Se dice que el estado Xi es observable en t0 cuando conocido el valor del estado Xi en el tiempo tf, la salida del sistema en el tiempo tf, y conocidas las entradas en el intervalo de tiempo [t0, tf], se puede establecer en forma única cuál era el valor del estado Xi en el tiempo t0.
Si todos los estados del sistema son observables en t0, se dice que el sistema es “completamente observable” en t0.

Técnicas para determinar la Controlabilidad y la Observabilidad
La Controlabilidad de un sistema depende de las matrices A y B
de la representación matricial del modelo.
Un sistema invariante en el tiempo
y con valores característicos de A
no repetidos es completamente
controlable, si y solo si, no hay fila
cero en la matriz :
M: Matriz Modal de A
El mismo sistema será completamente
observable si no hay columnas cero en
la matriz
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |