
Los sistemas ideados para el arranque de los motores
asíncronos monofásicos se basan por tanto en
provocar un desequilibrio entre los pares antagonistas que
generan ambos campos magnéticos. Las principales
realizaciones se basan en cambiar, al menos durante el arranque,
el motor monofásico por un bifásico (que "arranca
sólo"). Un motor bifásico tiene dos devanados en el
estator, desplazados p/(2·P). Las principales
realizaciones de motores monofásicos utilizando esta
técnica son: a) Motor de arranque por condensador
b) Motor de fase partida
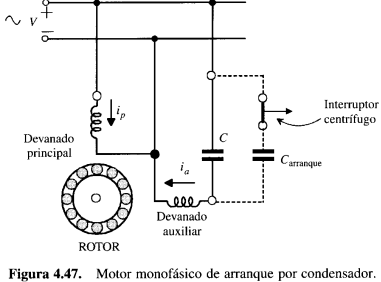
Motor
monofásico de arranque por condensador
Se trata de motores asíncronos monofásicos
que en el momento del arranque son bifásicos. Tienen por
tanto dos devanados en el inductor (que siempre está en el
estator) desplazados p/(2·P). Estos devanados
son:
El devanado principal, así denominado
porque es el que recibe energía durante todo el tiempo en
el que el motor está funcionando.
El devanado auxiliar, de características
idénticas al principal, pero al que se le ha
añadido un condensador en serie, que es el que permite
conseguir el desfasaje suficiente entre las dos corrientes. Se
denomina devanado auxiliar porque sólo recibe
energía eléctrica en el momento del arranque, ya
que posteriormente, dicho devanado se desconecta por la
acción de un interruptor centrífugo.
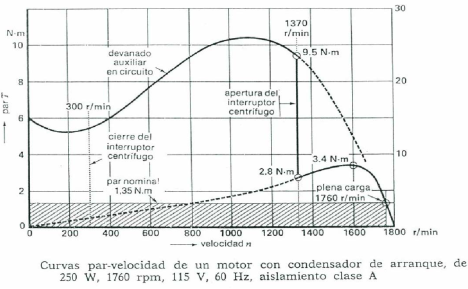
Para conseguir el arranque es necesario que las
corrientes de los dos devanados estén desfasadas como
puede apreciarse en la figura adjunta:

En la mayor parte de los motores monofásicos de
arranque por condensador, el motor arranca como bifásico,
pero cuando se alcanza una velocidad, de aproximadamente el 75%
de la velocidad de sincronismo, se abre el interruptor
centrífugo, funcionando a partir de ese momento como un
motor monofásico propiamente dicho.
Curva par-velocidad típica de este tipo de
motores.

La potencia activa absorbida por un motor
monofásico es pulsante a la frecuencia 2·w,
razón por la cual, este tipo de máquinas
eléctricas estarán siempre sujetas a vibraciones
mecánicas.
Motor de fase
partida
En este motor se sitúan en el estator dos devanados
desfasados 90º eléctricos. En este se crea un campo
magnético giratorio que mueva el inducido durante el
período de arranque. El campo magnético se obtiene
por capacidad o por inductancia.
El primer devanado, se denominado principal , cubre 2/3 de las
ranuras y tiene gran reactancia y baja resistencia, mientras que
el otro, denominado auxiliar, cubre el resto del estator y tiene
alta resistencia y baja reactancia se realiza con hilo más
delgado), de tal forma que está en serie con un
interruptor centrifugo situado en el eje del motor.
Para obtener el campo giratorio por capacidad, se
utilizan dos arrollamientos de bobinas en serie, llevando una de
ellas condensador, que es la que realiza el desfase y por tanto
el arranque del motor. El valor de la capacidad del condensador a
conectar en el motor viene dado por la siguiente
fórmula:

Este tipo de motores se utiliza en ventiladores, bombas
centrifugas, lavadoras, etc. Se construyen generalmente desde
potencia 50W hasta 500W.


Circuito
eléctrico equivalente de un motor
monofásico
A base de lo dicho, el circuito equivalente de un motor
monofásico tiene la forma representada en la Figura, donde
el circuito secundario con las resistencias x"2 y r"2/s
corresponde al campo giratorio directo, y con las resistencias x
y r corresponde al campo giratorio inverso.

Después de esta unión, el circuito
equivalente adquiere la forma representada en la
Figura.

Circuitos
equivalentes precisados de un motor asincrónico
monofásico
Saquemos en este circuito el circuito en paralelo con la
resistencia Xm a los terminales primarios. Entonces obtendremos
el circuito equivalente de la Fig. b) donde el coeficiente de
corrección s1, si se desprecia su parte imaginaria, es
igual a:


En el circuito magnetizante (Fig. b) se puede hacer s =
0, puesto que en este circuito Xm es grande en comparación
con las otras resistencias de este circuito. La corriente en
vacío ideal (s = O), igual a la corriente del circuito
magnetizante del circuito de la Fig. B, teniendo en cuenta la
resistencia óhmica del circuito magnetizante rm
será y la corriente del circuito principal del circuito de
la Fig. B será igual a

A base del circuito equivalente de la Fig.b se puede
escribir las expresiones para las potencias, los momentos y las
pérdidas en los devanados.

En el régimen de marcha en vacío ideal (s
= 0) y en el régimen de cortocircuito (s =1.0) tendremos
que PM = 0, puesto que en el primer caso I"2 = 0, y en el segundo
caso (1-s)=0.
En el caso de pequeños resbalamientos
correspondientes a los regímenes de funcionamiento del
motor, se puede aceptar que s2 = 0, por lo cual

Consideraciones
generales sobre el generador asincrónico
Un motor trifásico asíncrono que marcha
conducido por una maquina motriz (turbina de vapor, motor diesel,
etc.…) en la dirección del movimiento del motor y a
una velocidad mayor que la del sincronismo, es capaz de producir
energía eléctrica cuando su estator recibe una
tensión determinada. A estas maquinas se las denomina
generadores trifásicos asíncronos. La
corriente necesaria para la excitación ha de ser
totalmente reactiva y debe proceder de un generador
síncrono o de la red. Es decir, que el generador
asíncrono no tiene funcionamiento autónomo, ya que
no puede producir por sí mismo, la corriente de
excitación que necesita para su funcionamiento.
La velocidad de accionamiento es, en la práctica,
aproximadamente 7% superior a la velocidad del sincronismo. Se
dice entonces que el deslizamiento es negativo, también,
que la maquina marcha en hipersincronismo.
Funcionamiento del generador asíncrono
trifásico
El generador asíncrono trifásico puede ser
una maquina de inducción con rotor en cortocircuito. Por
lo tanto, resulta una maquina sencilla y barata que no necesita
corriente continua para la excitación y carece de anillos
colectores y de escobillas.

En la figura 225 se representa el esquema
de conexiones de un generador de esta clase, en donde puede
apreciarse la sencillez de la instalación. Se prescinde
totalmente de dispositivos para el arranque,
sincronización y regulación; por lo tanto no es
necesario personal de servicio especializado y el mantenimiento
es casi nulo, exceptuando la limpieza, engrase de los cojinetes,
etc.…
La corriente proporcionada por un generador
asíncrono es totalmente activa. La constancia del
deslizamiento está garantizada por la central con
generador síncrono que suministra la tensión de
forma que, aun cuando la maquina motriz que acciona el generador
carezca de regulador de velocidad, las oscilaciones de carga y de
tensión de la central principal quedan absorbidas y
autorreguladas.
Dadas sus condiciones de funcionamiento, el generador
asíncrono tiene la extraña propiedad de alimentar
una red con una frecuencia determinada, sin que su velocidad
corresponda a esa frecuencia.
Además de las ventajas indicadas, el generador
asíncrono es más económico, tiene menor peso
y las dimensiones, y tiene mejor rendimiento que el generador
síncrono de la misma potencia.
Las desventajas del generador asíncrono con
respecto al generador síncrono son:
a) Su funcionamiento no es autónomo, puesto que
su corriente de excitación ha de tomarla de una red ya
existente.
b) Como la corriente de excitación es totalmente
reactiva y ha de proporcionarla el generador síncrono
principal, disminuye el factor de potencia de este generador
principal.
c) Cuando ocurre un busco descenso de la carga de la
red, o se desconecte de la misma, el generador asíncrono,
bajo carga, existe el peligro de que la maquina motriz se embale,
a causa de que el generador está trabajando
prácticamente en vacio. Debe evitarse este peligro
mediante la instalación de interruptores
automáticos de intensidad mínima.
Los generadores asíncronos se utilizan en
centrales de reserva o en centrales de punta, para trabajar
conjuntamente con grandes centrales; las puntas de carga quedan
cubiertas con el generador asíncrono.
Particularidades sobre el uso del generador
asincrónico en la generación
eólica

En un aerogenerador transforma energía
cinética del viento en energía mecánica
mediante el giro del rotor eólico. Esta energía
mecánica que aparece en el eje de éste rotor en
forma de par y vueltas por unidad de tiempo, se transforma en
energía eléctrica mediante una máquina
eléctrica, que opera en modo generador de energía
eléctrica, gracias al giro del eje del rotor del
aerogenerador, provocado por la acción del viento sobre
las palas.
En las aplicaciones eólicas, la energía
eléctrica habitualmente se genera en forma de corriente
alterna (ca). Los generadores de corriente alterna (alternadores)
pueden ser de dos tipos.
a) Síncronos
De polos formados por electroimanes alimentados con
corriente continua.De polos formados por imanes fijos o
permanentes.
b) Asíncronos o de
inducción
De jaula de ardilla.
De rotor devanado.
Generador de
corriente alterna asíncrono o de
inducción
La utilización de la máquina
asíncrona o de inducción en generación de
energía eléctrica mediante aerogeneradores es
actualmente mayoritaria
En este tipo de máquina eléctrica, el
campo magnético giratorio se crea a través del
estator, cuyos devanados deberán estar conectados a una
fuente exterior de tensión alterna. Esta es la
razón básica por la que la máquina
asíncrona es consumidora de energía reactiva, ya
que al ser el bobinado una carga inductiva, para generar el campo
magnético consumirá corriente desfasada de la
tensión.
Si partimos de una máquina asíncrona con
el rotor en reposo, la acción del campo magnético
giratorio sobre las bobinas de rotor induce una fuerza
electromotriz en las mismas. Esta fuerza electromotriz inducida
motiva el paso de corrientes por las bobinas del rotor, las
cuales normalmente están cerradas en cortocircuito
(máquina de jaula de ardilla) presentando apenas
resistencia. El campo giratorio ejerce fuerzas sobre los
conductores recorridos por una corriente eléctrica,
originándose un par de giro que pone en movimiento al
rotor en el mismo sentido que el campo magnético
giratorio. El rotor irá girando cada vez más
rápido reduciéndose la diferencia de velocidades de
giro entre el campo magnético y el rotor. Al disminuir la
diferencia de velocidad, las tensiones inducidas, al igual que
las corrientes en el rotor decrecen llegando a ser nulas cuando
el rotor alcanza casi la velocidad de rotación del campo
giratorio, denominada velocidad de sincronismo.
La velocidad de sincronismo vendrá definida al
igual que en las máquinas síncronas por la
frecuencia de la señal eléctrica externa y por el
número de pares de polos alojados en este caso en el
estator.
A la diferencia entre la velocidad de giro del campo
magnético y del rotor se le denomina deslizamiento
(S).
Hasta este punto se ha descrito el funcionamiento de la
máquina asíncrona como motor, ya que se ha
utilizado energía eléctrica para mover un rotor –
energía mecánica.
Pero que ocurre si mediante una aeroturbina acoplada a
esta máquina hacemos girar el rotor en el mismo sentido
del campo giratorio, a una velocidad superior a la de
sincronismo. El deslizamiento cambiará de signo, el
sentido de la fuerza electromotriz inducida en la fase del rotor
se invierte, al igual que la corriente que ésta determina,
ambas tendrán una frecuencia correspondiente a la
diferencia de velocidades y la máquina pasará a
funcionar como generador, cediendo a la red a la que está
conectada la potencia que desarrolla la aeroturbina.
Tal circunstancia, evidentemente, no se da si en la
máquina no existe previamente un campo magnético
giratorio, lo cual exige que la red suministre a la
máquina de inducción la corriente magnetizante que
excite el campo magnético. Por ello, el generador
asíncrono se define como no autoexcitable.
A medida que aumenta la diferencia de velocidad de giro
entre el rotor y el campo magnético producido por el
estator, se produce una mayor tensión en el rotor y,
consiguientemente crece la corriente que circula por él.
Con mayor corriente, el campo magnético debido al rotor
también crece y el flujo de potencia activa hacia la red
eléctrica será mayor, al igual que el consumo de
potencia reactiva por parte de la máquina. Esta tendencia
se mantendrá hasta llegar al par resistente máximo
del generador.

Dentro de un rango limitado la potencia y el par son
proporcionales al deslizamiento, obteniéndose una
característica ligeramente inclinada. En este tramo la
energía reactiva consumida es capaz de mantener el flujo
magnético necesario para que el generador presente un par
resistente creciente, pero a partir de un determinado
deslizamiento (entre el 5 y el 10%, según la
máquina) el incremento de la corriente en el rotor hace
que las pérdidas debido a la resistencia del mismo
(pérdidas Joule), disminuyan el par resistente y, por lo
tanto, se puede producir el embalamiento del rotor.
Además, el excesivo aumento de las pérdidas produce
un sobrecalentamiento del rotor, que por radiación puede
afectar también al estator.
Este último inconveniente puede reducirse en
parte dependiendo del modo de ventilación utilizado y de
su propia construcción, ya que si todos los detalles del
diseño son conocidos se pueden aplicar límites
más ajustados mediante el cálculo cuidadoso de los
transitorios térmicos que puedan aparecer.
Por las anteriores razones, no es recomendable operar en
el rango cercano al deslizamiento máximo, aunque
también se puede incrementar el deslizamiento para un par
dado, aumentando la resistencia de las barras del rotor, pero el
producto del par y el deslizamiento creciente representa mayores
pérdidas, disminuyendo el rendimiento del
generador.
A la hora de seleccionar un determinado generador
asíncrono se deberá tener en cuenta el par
máximo en tanto por ciento, ya que el coste del generador
guarda cierta relación con la raíz cuadrada del par
máximo del mismo.
Como recomendación en el proceso de
selección, una vez conocida la potencia de la turbina a
utilizar, el rango de velocidades de viento en el emplazamiento
determinado y la característica par – velocidad del
generador, solo queda valorar la garantía y el precio.
Normalmente, se dan pocos casos en los cuales una velocidad de
viento excesiva haga que el par de la turbina pueda exceder del
par máximo del generador, no obstante se debe programar en
el control la desconexión de la línea, si la
potencia máxima se supera durante 10 segundos.
Posteriormente, el generador podrá volverse a conectar a
la línea en el momento en que la velocidad de la turbina
esté por debajo de la velocidad máxima del
generador. Por el contrario, con velocidades de viento muy bajas,
la velocidad de la turbina puede llevar a funcionar al generador
a velocidades por debajo de la velocidad de sincronismo,
invirtiéndose el par generador y poniéndose la
máquina a funcionar como motor. Si esta situación
se da durante un intervalo de tiempo determinado, la
máquina deberá ser desconectada de la
línea.
El aerogenerador con generador asíncrono o de
inducción sólo tiene, al igual que el basado en
generador síncrono una velocidad de viento óptima,
para la cual da la potencia nominal. Por debajo de esa velocidad
su rendimiento baja mucho, aunque se ajusta mejor al par ofrecido
por el rotor eólico gracias a la capacidad de disminuir un
poco su velocidad (deslizamiento).
Otra característica del generador de
inducción es su factor de potencia, el cual varía
con la carga. Una excesiva demanda de potencia reactiva es
peligrosa, ya que causa caídas de tensión en la
línea y en los transformadores. Recordemos que parte de
esa corriente reactiva demandada se utiliza como corriente
magnetizante para obtener un flujo magnético. La corriente
de magnetización para carga máxima varía
desde el 20% para generadores de 4 y 6 polos y el 40% para los
generadores de 10 polos o más. Respecto al porcentaje que
representa la potencia reactiva demandada por el generador sobre
su potencia máxima, éste suele suponer entre el 15
y el 20%.
Para pequeños generadores, el consumo de potencia
reactiva no es muy importante, pero para grandes máquinas
hay que tenerlo en cuenta sobre todo para efectuar la
compensación de corriente reactiva en vacío. Esta
compensación se realiza mediante baterías de
condensadores en paralelo con la línea de salida del
generador. La regulación de estas baterías se hace
por tensión mediante un relé, el cual
desconectará los condensadores si la tensión supera
el valor de 1.15 p.u. de la tensión nominal. Esta
protección suele estar ajustada para que abra a los 15
ciclos de detectar que la corriente del condensador supera a la
de magnetización, o la tensión sube
demasiado.
El alto par motor que presentan las máquinas
asíncronas en el momento de su conecxión a una red
eléctrica hace que absorban corrientes muy superiores a la
nominal (hasta 6 veces). Para evitar estas corrientes
habitualmente se instalan los denominados sistemas de arranque
suave (soft-start) compuestos por dos dispositivos
semiconductores en anti paralelo, por fase que limitan la
corriente de conexión, evitando variaciones de
tensión en la red que afecten a la calidad de suministro.
Este hecho se hace más palpable en sistemas
eólico-diesel o aerogeneradores conectados a redes
débiles.
Ya se ha dicho que la solución del generador
asíncrono para aerogeneradores conectados a red bien sean
redes de gran potencia o débiles (sistemas eólicos
– diesel o redes en antena) es la más extendida por su
fiabilidad, sencillez de operación y mantenimiento y
coste. Con respecto a la eficiencia del aerogenerador de
velocidad fija, cuando el aerogenerador opera bajo vientos con
velocidades inferiores a la nominal o de diseño (la
velocidad de viento a la que el aerogenerador alcanza su potencia
nominal suele encontrarse entre 10 y 14 m/s normalmente) su
eficiencia baja bastante por no poder acoplar las velocidad de
rotación a las variaciones de la velocidad del
viento.
Para mejorar el rendimiento del aerogenerador con
generador de inducción (velocidad constante), la
mayoría de los fabricantes diseñan el sistema de
generación con dos velocidades de sincronismo, de forma
que el sistema opere a una velocidad de rotación menor
para bajas velocidades de viento y mayor para altas velocidades
de viento.
Hay varias formas para obtener la operación a
doble velocidad:
1. Caja multiplicadora dos doble eje de salida con
distinta relación Par/vueltas.
2. Dos generadores de distinta potencia y número
de polos instalados sobre el mismo eje y sistema de
conmutación de las conexiones.
3. Generador de doble bobinado, la más utilizada.
(ABB, SIEMENS etc.)
Figura. Representación de las
características de un generador de inducción de
doble bobinado.

Las principales características que deben
tener los generadores de inducción para aplicaciones en
aerogeneradores son:
– Capacidad de operar a dos velocidades de
sincronísmo.
– Buen rendimiento a carga parcial.
– Buena relación potencia/peso.
– Gran capacidad de sobrecarga
instantánea.
– Bajo consumo de potencia reactiva.
– Alta calidad de bobinado de los devanados
especialmente en unidades de gran Potencia.
Describa los regímenes especiales
de la maquina asincrónica
Las máquinas asincrónicas
pueden estar divididas en:
Trifásica: | Para medias y grandes potencias, | ||||||
Monofásica: | Ampliamente utilizadas para | ||||||
Máquinas de rotor bobinado | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
En este tipo de máquina el rotor tiene En el caso trifásico ellos están | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Máquinas de jaula de En el empleo como motores de pequeña y Máquinas de jaula | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
En este tipo de máquina cada ranura de | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Rotor de jaula individual |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||



Máquinas
asincrónicas para dispositivos
automáticos
A. Maquinas Bifásicas Con rotor
Hueco
Estas maquinas encuentran amplia aplicación en
calidad de motores accionados (servomotores). En los esquemas de
la automática estos motores deben reaccionar a la
variación de una magnitud eléctrica determinada
(señal) y de acuerdo con la intensidad y la
duración de la acción de esta magnitud ejercer una
influencia determinada e los otros elementos del dispositivo
automático.

La construcción del motor con rotor hueco se
muestra en la fig. 26-5. El estator (2) de este motor es
de construcción análoga, al estator de una maquina
asincrónica normal y tiene un devanado (5) compuesto por
dos fases desplazadas en el espacio una de la otra a 90 grados
eléctricos. El motor tiene también un estator
interior (4), es decir, un paquete fijo de hojas de acero para
transformadores. El fin de este estator consiste en disminuir la
resistencia del circuito magnético del motor. El rotor (3)
del motor esta hecho en forma de cilindro hueco de paredes
delgadas (menos de un milímetro) de metal o de
aleación amagnética (por lo general aluminio). El
rotor está sujeto al casquillo (1) por intermedio del cual
el movimiento se transmite al árbol.
Con esta construcción el rotor posee una inercia
insignificante, cosa de extraordinaria importancia desde el punto
de vista de la rapidez de respuesta del motor a la
aparición o desaparición de la
señal.
Una de las fases del devanado del estator es el devanado
de excitación y durante el trabajo del dispositivo
automático está conectado a una tensión de
corriente continua de magnitud constante. L a otra fase es el
devanado de control al cual se transmite la así llamada
señal en forma de tensión de corriente alterna
desfasada 90º de la tensión de excitación y
puede variar desde cero hasta una magnitud
determinada.
Las maquinas con rotor hueco se emplean ampliamente
también en calidad de generador tacométrico. En los
dispositivos automáticos el generador tacométrico
es un elemento de medida de velocidad de rotación y
actúa sobre un elemento determinado del circuito por medio
de la f.e.m. inducida en el devanado de control.
B. transformadores
giratorios
En los dispositivos automáticos surge la
necesidad de obtener tensiones que son funciones del
ángulo de giro ? de un mecanismo determinado. Estas
tensiones actúan, a su vez, sobre otros elementos del
sistema realizando la regulación en función del
ángulo de giro.

Para semejantes fines se emplean transformadores
giratorios (fig. 26-8), análogos por su
construcción a las maquinas asincrónicas normales
con dos devanados (S, K) en el estator y dos devanados semejantes
(A, B) en el rotor. En estos transformadores se toman medidas
para que la distribución de la inducción
magnética a lo largo del entrehierro sea en lo posible a
la sinusoidal.
Este transformador se llama de senos y cosenos y las
tensiones de los devanados A y B serán también
proporcionales a sen a y cos a, si estos devanados
y sus cargas externas son iguales. En caso contrario surgen
distorsiones provocadas por el flujo de la reacción
transversal dirigido perpendicularmente al eje del devanado
S. Estas distorsiones se pueden reducir al mínimo
cortocircuitando el devanado K a una resistencia
pequeña exterior. Esta medida se llama
sincronización o equilibraje.
Máquina de doble | ||||||||||||||||||||||||||||||||||||||||||||||
En este tipo de máquina cada ranura de | ||||||||||||||||||||||||||||||||||||||||||||||
Rotor de doble jaula | ||||||||||||||||||||||||||||||||||||||||||||||

Esta solución está utilizada en los
motores que deben arrancar cargados, porque aumenta el par de
arranque disminuyendo la corriente de arranque.
La dificultad se encuentra en el planeamiento de los
entrehierros que limitan su mejor funcionamiento. La ventaja es
también de poder estar arrancado con tensión
reducida al vació. En este caso no es necesario
aislar los conductores rotóricos desde el
hierro.
Regímenes
especiales de trabajo de las máquinas
asincrónicas
El resbalamiento por unidad
resulta:

– Con resbalamiento negativo (velocidad
mayor que la sincrónica) la máquina
asincrónica es un generador.
– Con resbalamiento positivo entre 0 y 1 (velocidad
menor que la sincrónica) la máquina
asincrónica es un motor.
– Con resbalamiento positivo mayor que 1 (velocidad
negativa) la máquina asincrónica es un
freno.
Régimen de Frenado
eléctrico de los motores
asincrónicos
El cumplimiento correcto del proceso de
producción requiere en toda una serie de instalaciones un
frenado rápido y suave del motor, que sucede en
concordancia exacta con el diagrama dado de velocidades. El
frenado se puede realizar por vía mecánica o
eléctrica, pero el frenado eléctrico posee una
serie de ventajas ante el frenado mecánico, en particular
en aquellos casos cuando se exige una regulación precisa
del momento de parada y suavidad de la
operación.
Existen tres métodos principales de frenado
eléctrico de los motores asincrónicos: a)
régimen de contracorriente o régimen de freno
electromagnético, b) régimen de frenado por
generador y c) régimen de frenado
dinámico.
Frenado del motor por el método
de contracorriente.
Al frenar el motor por este método se cambia el
sentido de rotación del campo conmutando dos conductores
de líneas cualesquiera de los que están conectados
al estator.
En este caso el rotor gira en sentido contrario al campo
con el resbalamiento s >1. Si el motor tiene rotor con anillos
de contacto, entonces para limitar la contracorriente, en el
circuito del rotor se intercala una resistencia óhmica
rad. Sabemos que con el aumento de rad conlleva el máximo
del momento, permaneciendo constante de magnitud, se desplaza
hacia el lado de cada vez mayores resbalamientos
positivos.
Por consiguiente, se puede tomar tal resistencia rad,
con la cual el motor asincrónico, pasando al
régimen de freno electromagnético, desarrolle el
par de frenado necesario.
En la Figura se muestra el circuito que ha obtenido
mayor divulgación. Su particularidad característica
consiste en que, en primer lugar, durante el frenado el estator
del motor se conecta a la red como monofásico y, en
segundo lugar, en que dos devanados de fase están
cortocircuitados. Es sobre todo de gran importancia esta
última circunstancia, puesto que sin el circuito
cortocircuitado tendríamos un motor monofásico
corriente sin régimen de frenado.

Circuito de frenado de un motor
asincrónico
El análisis de este circuito demuestra que todo
sucede como si tuviéramos en un mismo árbol dos
motores trifásicos que desarrollan momentos dirigidos en
sentidos opuestos. Las características de frenado de este
circuito son favorables.
A los defectos de este circuito se refieren: peor
utilización de la máquina monofásica en
comparación con la trifásica, la influencia
desfavorable de la carga monofásica en la simetría
de la tensión de la red trifásica y un factor de
potencia reducido de la máquina. No obstante, en la
mayoría de los casos estos defectos no tienen gran
importancia.
A. Régimen de frenado por
generador.
Este régimen se emplea principalmente en los
motores con conmutación de los polos. Si el motor funciona
con el menor número de polos 2p, es decir, con la mayor
velocidad n1 = f/p, entonces, conmutándolo al mayor
número de polos 2.2p, realizaremos el frenado por
generador en los límites desde n1 = f/p hasta n"1 = f/2p.
Para continuar frenado hasta una velocidad inferior a n1 hay que
hacer pasar la máquina al régimen de
contracorriente.
El régimen de frenado por generador se emplea
también en los mecanismos de elevación y transporte
al bajar cargas pesadas. En este caso la máquina devuelve
a la red la energía recibida debido a la carga que
desciende.
B. Régimen de frenado
dinámico.
En este caso el estator se desconecta de la red y se
excita por la corriente continua de una fuente cualquiera de
corriente continua: un excitador o un rectificador. En la Fig.
2 se representa uno de los circuitos posibles. Aquí,
Est es el estator, dos devanados de fase del cual se
alimentan durante el frenado por el rectificador seco RS;
Rot es el rotor en cortocircuito; Int 1 e Int 2 son
los interruptores que conectan el rectificador durante el
frenado. Son posibles también otros circuitos de
conexión de los devanados del estator, por ejemplo: los
tres devanados de fase conectan en serie por el esquema
(A—X) — (Y—B) — (Z—C), dos
devanados paralelos se conectan en serie con el tercero,
etc.

En el circuito de la Fig. 26-2 se ve que en el
régimen de frenado dinámico la máquina
asincrónica representa un generador sincrónico
inverso en el que el estator crea un campo magnético
inmóvil en el espacio, y el rotor es el inducido del
generador. La energía de frenado se absorbe en el rotor.
En los motores con anillos de contacto, durante el frenado se
puede insertar la resistencia rad y con esto influir sobre la
curva del momento de frenado de la máquina, que como
muestra el análisis es casi igual que la curva del momento
de una máquina asincrónica.
En los motores de jaula de ardilla la variación
del par de frenado se alcanza regulando la tensión de la
corriente continua. En este caso se deben considerar las fuerzas
de tracción unilateral entre el estator y el
rotor.
Funcionamiento de
un motor asincrónico en el régimen de
alimentación doble (bilateral)
Habitualmente al motor asincrónico se suministra
energía eléctrica sólo por el lado del
estator. Pero en los motores con anillos de contacto se puede
suministrar la energía a ambas partes de la
máquina, es decir, al estator y al rotor, conectando para
ello sus devanados en serie o en derivación. Este
motor se llama motor de alimentación doble o.
bilateral.
Supongamos que el estator y el rotor están
conectados en paralelo, y aclaremos las condiciones necesarias
para el funcionamiento de un motor de alimentación
bilateral.
La corriente I1 suministrada de la red al estator, crea
una f.m., el primer armónico de la cual gira con respecto
del estator con la velocidad n1 = f/p.
La corriente I2 suministrada de la red al rotor, crea
una f.m. que gira con respecto del rotor con la velocidad n2 = n1
= f/p. El sentido de rotación de esta f.m. puede coincidir
con el sentido de rotación del rotor y puede ser contrario
a este último. Si n es la velocidad de rotación del
rotor, entonces, en el primer caso, la velocidad de
rotación de la f.m. del rotor en el espacio es igual a n +
n2 y, en el segundo caso, a n – n2.

Máquina de alimentación
doble
Para crear el momento de rotación es
necesario que las f.m. del estator y del rotor (los primeros
armónicos) sean inmóviles una respecto a otra, o
sea, que
n1 = n ± n2 o bien n = n1 – (±
n2)
En la última expresión del signo superior
se refiere al caso cuando la f.m. del rotor gira en el mismo
sentido que el rotor, y el inferior, al caso cuando gira en
sentido contrario al rotor. Dado que n1 = n2, el motor funciona
en el régimen de alimentación bilateral siendo a) n
= 0 y b) n = 2n1. En el Segundo caso tenemos una máquina
que gira con doble velocidad sincrónica y que posee una
serie de propiedades de la máquina sincrónica. En
particular, para realizar el régimen de doble velocidad el
motor debe ser acelerado hasta esta velocidad por medios ajenos.
También es un defecto de esta máquina su mayor
tendencia a las oscilaciones.
Si U = const., prácticamente permanece
también constante el flujo ? de la máquina de la
alimentación bilateral y, por consiguiente, la f.m.
resultante Fm de los devanados del rotor y el estator. En el
régimen de marcha en vacío los ejes de las f.m. de
los devanados del estator F1 y del rotor F2 coinciden, por lo
cual, considerando F1 y F2 como vectores espaciales, se puede
escribir que

Durante la carga del motor su rotor se desplaza cierto
ángulo ? con respecto al estator y entonces a lo que
corresponde el diagrama vectorial de la Fig. 6.4. En este caso
aumentan correspondientemente las magnitudes de las f.m. F1 y F2
y simultáneamente aumentarán las corrientes en el
estator y en el rotor.

El motor de alimentación bilateral puede
también funcionar en el régimen de velocidad
asincrónica, pero, en este caso, la máquina entrega
a la red corrientes con frecuencia de resbalamiento, cosa que se
refleja negativamente tanto en el funcionamiento de la red, como
de los generadores sincrónicos que la alimentan. Por esta
razón, el significado práctico de la máquina
asincrónica de alimentación bilateral en los
regímenes de velocidades sincrónica y
asincrónica no es muy grande.
En el caso general la máquina de
alimentación bilateral puede funcionar alimentada por la
red con distintas tensiones y frecuencias y tener un estator y un
rotor con distintos parámetros.
Este caso fue investigado por V. T. Kasyanov, que dio
las expresiones generales para las corrientes y f.e.m. de esta
máquina, y que mostró que se puede considerar como
un caso general de las máquinas de corriente alterna. Las
máquinas de alimentación bilateral, tanto las
trifásicas, como sobre todo las monofásicas, tienen
gran aplicación en los sistemas de enlace por aparatos
sincrónicos.
Embrague electromagnético
deslizante
El embrague electromagnético deslizante se emplea
para el enlace elástico entre el motor primario y el
mecanismo accionado. Este embrague está compuesto por a)
la parte conducida, generalmente la interior, que
prácticamente representa el rotor de una máquina
asincrónica con devanado de fase o, con más
frecuencia, en jaula, y b) la parte conductora, la exterior, con
polos salientes excitados por corriente continúa. La parte
conducida del embrague está acoplada mecánicamente
con el mecanismo accionado; la parte conductora, con el motor
primario.
Durante la rotación la parte conductora excitada
entra en interacción electromagnética con la parte
conducida y la arrastra con cierto resbalamiento s, así
como el campo giratorio de un motor asincrónico arrastra
el rotor. En el régimen de funcionamiento estable s =
1-2%.
Regulando la corriente de excitación tenemos la
posibilidad de embragar y desembragar simple y muy suavemente las
partes conductora y conducida. Al mismo tiempo,
correspondientemente a cada valor dado de la corriente de
excitación el embrague desarrolla un momento de vuelco
determinado y, por consiguiente, es una especie de seguro que
protege al motor primario contra las sobrecargas excesivas y los
saltos de la carga.
Haciendo la parte conducida con dos jaulas de ardilla se
puede obtener un embrague que desarrolla pares de arranque
bastante considerables. La rama principal de aplicación de
los embragues electromagnéticos son las instalaciones de
hélice en los barcos. En la actualidad estos embragues se
emplean en las instalaciones aerodinámicas. La potencia de
una de estas instalaciones es de 8800 Kw.
Conclusiones
Generales
El motor asincrónico o de inducción es el
tipo de motor de corriente alterna más popular debido a la
simplicidad y facilidad de operación. Un motor de
inducción no tiene circuito separado de campo; en su
lugar, depende de la acción de un transformador para
inducir voltajes y corrientes en su circuito de campo. En efecto
un motor, de inducción es básicamente un
transformador rotante y su circuito equivalente es similar al de
un transformador, excepto en lo que respecta a la
variación de la velocidad.
También cabe destacar, que el motor
asincrónico opera normalmente a una velocidad cercana a la
sincrónica, pero nunca puede operar a esa velocidad.
Siempre debe haber algún movimiento relativo para inducir
voltaje en el circuito de campo del motor
asincrónico.
Por otro lado, en un motor de inducción, el
deslizamiento o velocidad al cual ocurre el par máximo
puede ser controlado variando la resistencia del rotor. El valor
del par máximo es independiente de la resistencia del
rotor. Si la resistencia del rotor es alta, disminuye el valor de
la velocidad a la cual ocurre el par máximo e incrementa
el par de arranque del motor.
Las maquinas de inducción se pueden utilizar como
generador si hay una fuente de potencia reactiva (capacitores
estáticos o una maquina sincrónica) disponible en
el sistema de potencia. Un generador de inducción aislado
presenta graves problemas problemas de regulación de
voltaje, pero cuando opera en paralelo con un gran sistema de
potencia, este puede controlar el voltaje de la maquina. Los
generadores de inducción son maquinas pequeñas que
se utilizan en fuentes de energía alternativas como
molinos de viento o en sistemas de recuperación de
energía. Casi todos los generadores grandes en uso son
generadores sincrónicos.
Bibliografía
Máquinas Eléctricas 5ta
ed. – Jesús Fraile MoraMaquinas Eléctricas 2da ed.
– Irving L. KosowMaquinas Eléctricas 4ta ed.
– Stephen J. ChapmanMáquinas Eléctricas II –
M. Kostenko – L. PiotrovskiMáquinas de corriente alterna –
Juan María Ortega PlanaEnergía Eólica – Miguel
Villarrubiahttp://www.ute.com.uy/empresa/entorno/Energias_Renovables/eolica/Actividad_2002/Eolica_Generadores.pdf
http://www.monografias.com/trabajos61/motor-induccion-monofasico/motor-induccion-monofasico.shtml
Autor:
Buscador
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |