- Resumen
- Introducción
- Prótesis y manos
robóticas - Prótesis roboticas
- Ventajas de las prótesis
mioeléctrica - Desventajas de las
prótesis - Conclusiones
- Referencias
Resumen
Medite el siguiente articulo se hace una
revisión de las prótesis de mano roboticas mas
importantes que se han creado en la actualidad tales como la
prótesis de Mi-electrica (Otto Bock) , y la mas utilizada
en todo el mundo que es Prótesis Bionica I-Limby se
determinar el principal funcionamiento de las
prótesis.
Index
Terms—Prótesis , control de robots,
prótesis robóticas.
I.
INTRODUCCIÓN
Las amputaciones en miembros superiores, en particular
las producidas por debajo del codo, resultan en una im- portante
pérdida de funcionalidad en las personas afectadas. Las
prótesis tradicionales de gancho y accionadas mediante
movimientos del hombro, que han sustituido de manera más o
menos satisfactoria la mano perdida en muchos amputados,
están dejando paso gradualmente a otras soluciones
más perfeccionadas: las prótesis
mioeléctricas [1][2
En términos generales una prótesis (dentro
del ámbito médico), es una extensión
artificial que reemplaza una parte faltante del
cuerpo.[2]
Existen en la actualidad diversos tipos de
prótesis mioeléctricas de mano con prestaciones
dispares, desde las que únicamente realizan el movimiento
de pinza para agarrar objetos, hasta las que rotan la
muñeca y transmiten sensaciones relacionadas con
frío o calor y con la presión ejercida. En todo
caso, las prótesis mioeléctricas son muy caras y
gran parte de los amputados no resultan buenos candidatos para
ser usuarios de dichas prótesis.
[1][2][3][4][5]
II.
PRÓTESIS Y MANOS ROBÓTICAS
El progreso del diseño de los prototipos de las
prótesis ha estado ligado directamente con el progreso en
el manejo de los materiales como aluminio, plástico,
titanio etc. empleados por el hombre, así como el avance
tecnológico y el entendimiento de la biomecánica
del cuerpo humano[7]

Figura 1. MANOS
ROBÓTICAS
Se ha desarrollado con el fin de mejorar o reemplazar
una función, una parte o un miembro completo del cuerpo
humano afectado, por lo tanto, una prótesis para el
paciente y en particular para el amputado, también
colabora con el desarrollo psicológico del mismo, creando
una percepción de totalidad al recobrar movilidad.
[8]
Respecto al modo de control, se puede considerar
aquellas prótesis que son accionadas mediante el uso de
interruptores o comandos preprogramados, o aquellas que responden
a la voluntad humana empleando alguna señal
biológica (Elec- tromiografía,
Electroencefalografía, etc). [6] En la siguiente figura 1
un mapa de descripción en general

Figura 2. Clasificación de
prótesis[6]
II-A. Actuadores
Un actuador – transductor, es un elemento que
convierte un tipo de energía (eléctrica,
hidráulica o neumática), cau- sando un efecto de
movimientos lineales o angulares en un sistema automatizado. Los
mecanismos en manos robóticas están compuestos por
motores o materiales compuestos los cuales pueden ser
clasificados de acuerdo a su principio de funcionamiento,
además son clasificados en convencionales y no
convencionales. Los primeros se basan en principios
electromagnéticos mientras que los otros son basados en
fenómenos físicos relacionados directamente a la
composición atómica del material, por ejemplo el
caso de uniones metálicas, materiales
piezoeléctricos, compuestos químicos,
etc[8]
II-B. Sensores
Las señales que se emiten son complejas que
integran la actividad motora y sensorial es el hecho de agarrar
algo con la mano. El trabajo que se emplea en coger
un vaso está regulada por la información
táctil (textura, presión…) en contacto con el
vaso, de esta manera se ejerce un trabajo necesaria para
sujetarlo sin que se resbale, y sin producir un esfuerzo
excesivo. Este tipo de control en la mayoría
prótesis actuales se hace utilizando un sistema de
visión, sin embargo esto supone que el manejo de la
prótesis no es posible sin utilizar el sistema de
visión. Los sensores pueden ser clasificados en
función de diferentes parámetros. [9]
Los parámetros que determinan los
distintos comportamientos de los sensores pueden ser:
Físico (piezoeléctrico,
piezorresistivo)
Fenómeno que miden. (Tacto,
velocidad, fuerza, posición, temperatura, etc.)
Según el comportamiento físico, los
diferentes sensores táctiles artificiales se pueden
clasificar en: Sensores Piezoeléctricos, Capacitivos,
Resistivos, Celdas de Carga, Galgas Extensiomé- tricas, De
Efecto Magnético, Acelerómetros, Biopotenciales,
Sensores Basados en Análisis de Color, etc.En la tabla 1
se muestra un resumen comparativo de posibles equivalencias de
sensores biológicos y sensores artificiales para el
conjunto de lo que se han denominado "sensaciones
táctiles".

Figura 3. Sensores biológicos y
artificiales[9]
III.
PRÓTESIS ROBOTICAS
Básicamente se caracterizan como prótesis
roboticas aque- llas que tiene una fuente de energía
propia, un actuador, y sensores que permiten leer los movimientos
deseados por el usuario. Por lo tanto también se requiere
un sistema de procesamiento de esas señales para poder
convertir esas señales en movimientos de los actuadores.
En esta definición no es necesario que el sistema provea
de retroalimentación al usuario.6En el desarrollo se basa
en el la amplificación de señales que viene del
mismo cuerpo, para lo cual se aplica amplificadores operacional y
de ahí pasara mediante un filtrado. Lo cual se ha
organizado en bloques o etapas (Figura4), detalladas a
continuación.
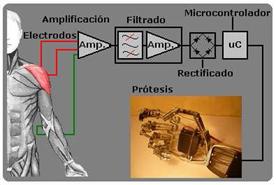
Figura 4. Diagrama en bloques del
tratamiento de la señal.
III-A. Prótesis
eléctrica
Estas prótesis usan motores eléctricos en
el dispositivo terminal, muñeca o codo con una
batería recargable. Éstas prótesis se
controlan de varias formas, ya sea con un servo- control, control
con botón pulsador o botón con interruptor de
arnés. En ciertas ocasiones se combinan éstas
formas para su mejor funcionalidad. Se usa un socket que es un
dispositivo intermedio entre la prótesis y el
muñón logrando la suspensión de éste
por una succión. Es más costosa su
adquisición y reparación, existiendo otras
desventajas evidentes como son el cuidado a la exposición
de un medio húmedo y el peso de la
prótesis.[8][10]
III-B. Mano Mi-electrica (Otto
Bock)
Esta mano tiene una troque de agarre (100N) y una ve-
locidad (300 mm/s), se pueden coger objetos rápidamente y
con precisión buena .Permiten la adaptación
óptima a las diferentes necesidades y capacidades del las
personas la necesiten la prótesis. Los objetos se fijan y
se colocan mediante señales musculares, ya que el sistema
electrónico de la MyoHand no reajusta
automáticamente la fuerza de agarre. Esta prótesis
se recomienda a pacientes activos con un nivel de
amputación bajo. Gracias a los distintos programas de
control puede encontrar una selección perfectamente
indicada para el paciente. La velocidad y la generación de
la fuerza de agarre pueden adaptarse perfectamente a las
necesidades del usuario mediante el MyoSelect
757T13.[10]

Figura 5.
III-C. Mano electrónica (Otto
Bock)
Esta mano tiene el Control Dinámico de Modo (DMC
en ingles) la velocidad y la fuerza de aprehensión se
regulan de forma proporcional a la fuerza de la señal
muscular. Este control también se caracteriza por un nuevo
tipo de modo de seguridad: Después de agarrar una vez con
la máxima fuerza, se requiere una señal EMG
ligeramente más alta para abrir la mano. Esto evita que la
mano se abra debido a una contracción involuntaria del
músculo. El control Digital Twin combina en una sola mano
ambos controles clásicos: el digital y el control por
doble canal.[11]

Figura 6. Mano
eléctrica
III-D. Prótesis Bionica
I-Limb
La prótesis I-limb es la primera mano
biónica disponible para el comercio en el mundo cuyos
dedos son controlados independientemente y por lo tanto permiten
una gran cantidad de movimientos. Esta mano es capaz de hacer
agarres de precisión y de potencia de diferentes formas.
La mano I-limb ya ha sido implantada en pacientes de varios
paises [12][8].
La prótesis cuenta con cinco dedos
que, gracias a sus respectivos motores, pueden funcionar y ser
articulados de manera independiente. El pulgar puede rotar 90
grados. La mano i-LIMB, se controla utilizando el tradicional
sistema mioeléctrico con entrada de 2 señales
musculares para abrir y cerrar los dedos de la mano, siendo
altamente intuitiva para el paciente. La señal
eléctrica generada en los músculos del miembro
residual es recogida por los electrodos que van situados sobre la
piel, controlando el funcionamiento de la mano. En la figura se
presenta la mano I-LIMB.[11][8]

Figura 7. Elementos de un dedo

Figura 8. Mano I-limb
IV. VENTAJAS DE
LAS PRÓTESIS MIOELÉCTRICA
Muchas personas prefieren este tipo de control porque, a
diferencia de las prótesis accionadas por el cuerpo que
requieren el movimiento general del cuerpo para operarla, una
prótesis controlada en forma mioeléctrica
sólo requiere que el usuario flexione sus músculos.
Esto elimina la necesidad de un arnés apretado de control,
que a menudo es muy incómodo.[10][11]
Otra ventaja de las prótesis mioeléctricas
es que debido a que no requieren un cable o arnés de
control, se puede aplicar piel cosmética en látex o
silicona, con lo cual se mejora en gran medida la
restauración cosmética. El paciente también
puede operar la prótesis sobre su cabeza, hacia sus pies y
hacia los lados, todo lo cual resulta muy difícil de hacer
con una prótesis accionada por el cuerpo. Una
prótesis controlada en forma mioeléctrica
también elimina el arnés de suspensión
usando una de las dos siguientes técnicas de
suspensión: bloqueo de tejidos blandos/esqueleto o
succión. Un bloqueo de tejidos blandos/esqueleto es una
técnica que implica el diseño de una cavidad
socket[10][11]
V. DESVENTAJAS DE
LAS PRÓTESIS
A diferencia de otras opciones protésicas, la
pró- tesis accionada por electricidad usa un sistema de
batería que requiere una cierta cantidad de mantenimiento
para cargarla, descargarla, desecharla y reemplazarla
eventualmente. Debido al peso del sistema de
batería y de los motores eléctricos, la
prótesis accionada por electricidad tiende a ser
más pesada que otras opciones protésicas, aunque
las técnicas avanzadas de suspensión pueden
minimizar esta sensación. 10][11]
Cuando se montan y se fabrican correctamente, las
prótesis accionadas por electricidad no requieren
más mantenimiento que otras opciones protésicas.
Sin embargo, cuando es necesa- rio hacer reparaciones,
éstas son con frecuencia más costosas que en otras
opciones debido a su complejidad técnica. Una
prótesis accionada por electricidad proporciona un mayor
nivel de tecnología, pero a un mayor costo. Una
prótesis accionada por electricidad puede dañarse
debido a la humedad. Por eso si se trabaja alrededor de un medio
de fuerte humedad, probablemente ésta no debería
ser su prótesis primaria de trabajo10]
VI.
CONCLUSIONES
En este artículo se presento se
reviso las prótesis robóticas
actuales. Se realizo una breve clasificación de los
diferentes tipos de prótesis mas comunes. Se
explica porque es útil el desarrollo de prótesis
robóticas, y los principales retos que existen para crear
prótesis fiables y de alto rendimiento que emulen
apropiadamente el comportamiento de los miembros que
sustituyen.Una de las principales limitaciones por la cual el
desarrollo de prótesis robóticas comerciales no se
ha arraigado es el relativamente pequeño numero de
personas que lo necesitan[13]
Para el desarrollo dentro la tecnologías la
roboticas juega un papel muy importante como soporte para la
humanidad ya que por medio de la tecnología uno puede
diseñar extremidades que han sido amputadas por un
accidente o por alguna enfermedad
VI-A. Conclusiones en ingles
This article was presented was reviewed existing robotic
prosthetics. We performed a brief classification of the different
types of joint prostheses. It explains why it is useful to
develop robotic prostheses, and the main challenges that exist to
create prosthetics high performance reliable and properly emulate
the behavior of members of the major limitations sustituyen.Una
why the development of commercial robotic prostheses not well
established is the relatively small number of people in need
[13]
For the development within the robotic technology plays
an important role as support for humanity because through
technology one can design limbs that have been amputated due to
an acciden
REFERENCIAS
[1] 11. HEARD D C Y, FARRY K A, ATKINS D J. A
comparison of functional capabilities of below-elbow unilateral
body-powered hook and electric hand users. Myoelectric Control
"95 (MEC"95). New Brunswick, Canada: Fredericton, August 1995;
28-35. 12. HARWIN W S, RAHMAN T, FOULDS R A. A review of design
issues in rehabilitation robotics with reference to north
american research. IEEE Transactions on Rehabilitation
Engineering. 1995; 3 (1): 3-1.
[2] DOERINGER J A, HOGAN N. Perfomance of
above elbow body- powered prostheses in visually guided
unconstrained motion tasks. IEEE Transactions on Biomedical
Engineering. 1995; 42 (6): 621-631.
[3] HARWIN W S, RAHMAN T, FOULDS R A. A
review of design issues in rehabilitation robotics with reference
to north american research. IEEE Transactions on Rehabilitation
Engineering. 1995; 3 (1): 3-12.
[4] DUPONT A C, MORIN E L. A myoelectric
control evaluation and trainer system. IEEE Transactions on
Rehabilitation Engineering. 1994; 2 (2):
100-107.
[5] O"NEILL P A, MORIN E L, SCOTT R N.
Myoelectric signal charac- teristics from muscles in residual
upper limbs. IEEE Transactions on Rehabilitation Engineering.
1994; 2 (4): 266-270.
[6] LisandroPuglisi yHéctor Moreno
encontar en
www.disam.upm.es/~barrientos/Curso_Robots_Servicio/R_servicio/Protesis_files/Protes
[7] J. Dorador, P. Ríos, R. Flores,
A. Juárez, "Diseño de prótesis inteligen-
tes", Departamento de ingeniería mecatrónica,
2004
[8] DISEÑO Y CONSTRUCCION DE UNA
PROTESIS ROBOTICA DE MANO FUNCIONAL ADAPTADA A VARIOS AGARRES
disponible en Internet
en:www.unicauca.edu.co/deic/Documentos/Tesis
%20Quinay %E1s.pdf
[9] [46] [11] H. Nicholls, M. Lee, "A
Survey of Robot Tactile Sensing Technology". IJRR,
vol 8, No 3, pp. 3-30, 1989.
[10] Roboticas y prótesis
inteligentes, revista universitaria,> disponible en
Internet
http://www.revista.unam.mx/vol.6/num1/art01/art01_enero.pdf
[11] Protesi Robotica . LISADRO PUGLISI Y
HERCTOR MORENO disponible en
internethttp://www.disam.upm.es/~barrientos/Curso_Robots_Servicio/R_servicio/Protesis_files/
[12] I-Limb Hand, Brochure. www.touchbionics.com.
[13] Sally Adee "Winner: The Revolution
Will Be Prosthetized". IEEE Spectrum.
Autor:
Jose David Minchala
Otavalo
Universidad Politécnica salesiana
(sede Cuenca)