
INTRODUCCIÓN

INTRODUCCIÓN Motor de inducción Métodos
escalares y Métodos vectoriales Control no Lineal Control
de Estructura Variable: Modo Deslizante

FUNDAMENTOS DEL CONTROL DE ESTRUCTURA VARIABLE

CONTROL DE ESTRUCTURA VARIABLE Un sistema de estructura variable
(VSS) consiste en un conjunto de subsistemas continuos junto con
una lógica de conmutación adecuada. Los sistemas en
modo deslizante son un tipo especial de estos sistemas

CONTROL DE ESTRUCTURA VARIABLE En los sistemas con modo
deslizante, el estado de las dinámicas del sistema es
atraído hacia una superficie en el espacio de estados
conocida como superficie de deslizamiento S(x) superficie de
Deslizamiento

CONTROL DE ESTRUCTURA VARIABLE 1. ELECCIÓN DE LA
SUPERFICIE DE CONMUTACIÓN Puede ser cualquier
función del estado X tal que el error de regulación
o seguimiento se haga cero en régimen permanente:

CONTROL DE ESTRUCTURA VARIABLE 2. ALCANZABILIDAD DE LA SUPERFICIE
DE DESLIZAMIENTO

CONTROL DE ESTRUCTURA VARIABLE Un sistema de estructura variable
se puede definir, en forma general de la siguiente manera:

CONTROL DE ESTRUCTURA VARIABLE La señal de control es
discontinua y puede tomar los valores o , sus puntos de
discontinuidad corresponden con los cambios de estructura del
sistema. Señal de control = =

CONTROL DE ESTRUCTURA VARIABLE y son campos vectoriales que
pueden ser definidos de la siguiente manera:

Señal del controlador en modo deslizante CONTROL DE
ESTRUCTURA VARIABLE

CONTROL DE ESTRUCTURA VARIABLE Condición de
Alcanzabilidad

CONTROL DE ESTRUCTURA VARIABLE 3. DINÁMICA DE
DESLIZAMIENTO IDEAL (CONDICIÓN DE INVARIANZA) La
dinámica del sistema en modo deslizante cuando tiende a
cero se conoce como dinámica de deslizamiento ideal.

CONTROL DE ESTRUCTURA VARIABLE La dinámica promediada del
sistema ó dinámica de deslizamiento ideal,
está ligada a la ecuación de la superficie. La
dinámica de deslizamiento ideal queda caracterizada por:
Llamada condición de invarianza

CONTROL DE ESTRUCTURA VARIABLE 4. CONTROL EQUIVALENTE El control
equivalente ( ) es una ley de control que lleva al sistema a
deslizarse sobre la superficie en forma ideal, siendo un valor
continuo que representa el valor medio del control
discontinuo.

CONTROL DE ESTRUCTURA VARIABLE Control Equivalente

CONTROL DE ESTRUCTURA VARIABLE Siendo y teniendo en cuenta que
depende también del tiempo: Siempre y cuando:

CONTROL DE ESTRUCTURA VARIABLE 5. CONDICIÓN DE
TRANSVERSALIDAD Lo que significa que no puede ser tangente a la
superficie de conmutación (esto es, debe ser transverso a
la superficie).

CONTROL DE ESTRUCTURA VARIABLE 6. REGIONES DE DESLIZAMIENTO. De
acuerdo a las condiciones de alcanzabilidad Existe deslizamiento
si y solo si:

CONTROL DE ESTRUCTURA VARIABLE Se definen y como las regiones del
espacio de estados donde puede crearse un modo de
deslizamiento.

CONTROL DE ESTRUCTURA VARIABLE Cabe anotar que existirá un
régimen de deslizamiento local en S (x), si y solo
si:

CONTROL DE ESTRUCTURA VARIABLE 7. PUNTO DE EQUILIBRIO Y
ESTABILIDAD ASINTÓTICA Si el régimen de
deslizamiento existe, la dinámica de deslizamiento ideal
está dada por las condiciones de invarianza:

CONTROL DE ESTRUCTURA VARIABLE En régimen permanente, las
derivadas de las variables de estado son nulas en un problema de
regulación y es un punto de equilibrio del sistema, por lo
tanto:

DISEÑO DE CONTROLADORES EN MODO DESLIZANTE

PROCEDIMIENTO Selección de la superficie de deslizamiento.
Comprobar que exista modo de deslizamiento en torno a la
superficie de conmutación (condición de
transversalidad). Calculo del control equivalente.

PROCEDIMIENTO Determinar que las regiones en la que existe el
modo de deslizamiento y el control equivalente estén
acotados por los valores discretos de la variable de control. Se
obtiene la dinámica de deslizamiento ideal del sistema
entorno a la superficie de conmutación (Condición
de invarianza)

PROCEDIMIENTO Se obtiene el punto de equilibrio de la
dinámica de deslizamiento ideal, que deberá ser
alcanzado. Comprobación de la estabilidad de la
dinámica alrededor del punto de equilibrio. Se deben
cumplir cada uno de los puntos mencionados, de lo contrario se
debe escoger una nueva superficie de deslizamiento.

IMPLEMENTACION DEL CONTROL Diagrama de bloques sistema de control
en modo deslizante

COMPROBACION ESTABILIDAD GLOBAL ASINTOTICA El procedimiento
anterior garantiza estabilidad asintótica al punto de
equilibrio deseado. Lo podemos comprobar mediante el teorema de
Lyapunov. Podemos concluir que probar la estabilidad
asintótica verificando el teorema de Lyapunov es
equivalente a examinar las regiones de deslizamiento

DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE

DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Motor
de inducción
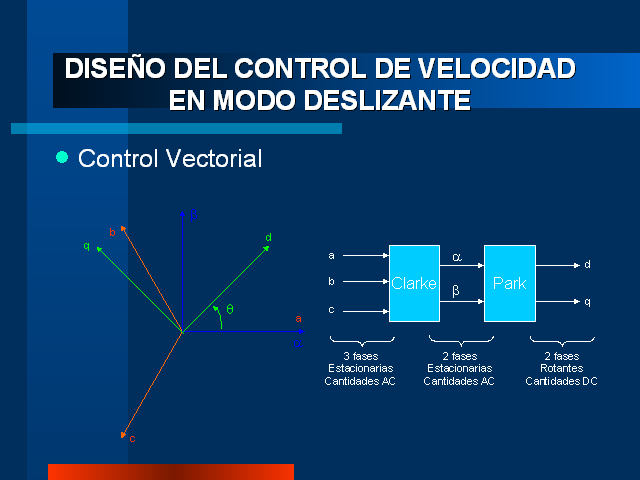
DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Control
Vectorial b c a a b d q q (Gp:) Clarke (Gp:) Park (Gp:) a (Gp:) b
(Gp:) c (Gp:) a (Gp:) b (Gp:) d (Gp:) q (Gp:) 3 fases
Estacionarias Cantidades AC (Gp:) 2 fases Estacionarias
Cantidades AC (Gp:) 2 fases Rotantes Cantidades DC

DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Control
Vectorial a, d q ?r is ?s (Gp:) q (Gp:) d (Gp:) q (Gp:) d (Gp:) q
(Gp:) d

DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE Modelo
matemático del motor de inducción

DISEÑO DEL CONTROL DE VELOCIDAD Por otro lado la
ecuación mecánica se describe de la siguiente
manera: La ecuación del torque electromagnético se
puede expresar en términos de corriente de estator y
flujos de enlace del rotor así:

DISEÑO DEL CONTROL DE VELOCIDAD Teniendo en cuenta lo
anterior, la ecuación de torque electromagnético se
puede escribir de la siguiente manera: Entonces la
ecuación mecánica se puede reescribir de la
siguiente manera:

DISEÑO DEL CONTROL DE VELOCIDAD Considerando la
ecuación mecánica con incertidumbres tenemos
que:

Donde: Ahora se define el error de velocidad en variables de
estado: DISEÑO DEL CONTROL DE VELOCIDAD

DISEÑO DEL CONTROL DE VELOCIDAD EN MODO DESLIZANTE
Remplazando la derivada de x(t) en la ecuación
mecánica con incertidumbres tenemos que: Donde:

ESTA PRESENTACIÓN CONTIENE MAS DIAPOSITIVAS DISPONIBLES EN
LA VERSIÓN DE DESCARGA