
1
Accionamientos de avance:
Son aquellos accionamientos de velocidad variable usados en aplicaciones de par constante (por ejemplo: posicionado de elementos móviles).
Potencia comprendida entre 30W y 10KW.
Aplicaciones:
Máquina herramienta (movimiento de los carros de las máquinas.
Robótica (movimiento de los ejes del robot).
En general, aplicaciones donde se quiera controlar:
Par,
Velocidad, o
Posición.
INTRODUCCIÓN

2
(Gp:) Motores paso a paso. Posicionado del elemento móvil sencillo, realizado en lazo abierto (prestaciones dinámicas pobres). Rendimiento del 20%.
Servomotor DC de imán permanente. Control de posición en lazo cerrado. Actualmente usados en aplicaciones de bajo costo.
Servomotor brushless DC. Inercia 10 veces menor que un servomotor DC. Problema: rizado de par.
Servomotor brushless AC. Control digital y control del lazo de posición. Prestaciones excelentes.
(Gp:) Década 60:
(Gp:) Década 70:
(Gp:) 1985:
(Gp:) 1990:
EVOLUCIÓN

3
Servomotor: motor utilizado en los accionamientos de avance.
Lleva acoplado algún elemento sensor (encoder, resolver o tacodinamo) para captar la posición del rotor.
Control fino de par, velocidad o posición, mediante la alimentación a través de un convertidor electrónico de potencia.
(Gp:) Sistema de
Control
(Gp:) Convertidor
de potencia
(Gp:) Servomotor
(Gp:) Consigna
(Gp:) Sensor
CARACTERÍSTICAS BÁSICAS
Elementos servoaccionamiento

4
El motor se alimenta a través de un inversor trifásico que opera en
modulación y anchura de pulsos (PWM).
Así es posible alimentar el motor a tensión y frecuencia variable.
(Gp:) Rectificador
(AC/DC)
(Gp:) Filtro
(Gp:) Freno
regenerativo
(Gp:) Inversor (IGBT´s)
(DC/AC)
Convertidor de potencia
CARACTERÍSTICAS BÁSICAS
5
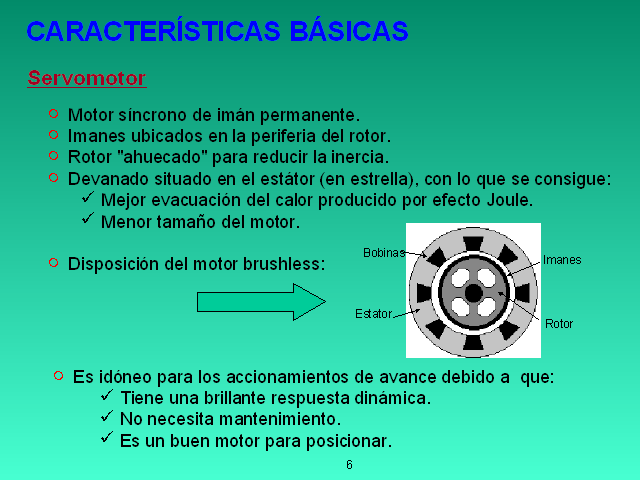
Motor síncrono de imán permanente.
Imanes ubicados en la periferia del rotor.
Rotor "ahuecado" para reducir la inercia.
Devanado situado en el estátor (en estrella), con lo que se consigue:
Mejor evacuación del calor producido por efecto Joule.
Menor tamaño del motor.
Disposición del motor brushless:
Es idóneo para los accionamientos de avance debido a que:
Tiene una brillante respuesta dinámica.
No necesita mantenimiento.
Es un buen motor para posicionar.
CARACTERÍSTICAS BÁSICAS
Servomotor
(Gp:) Estator
(Gp:) Rotor
(Gp:) Imanes
(Gp:) Bobinas
6
Operación:
Par constante (imanes permanentes).
Características:
Baja inercia.
Elevado par de pico.
Posicionado preciso.
Control:
Par.
Velocidad.
Posición.
Aplicaciones:
Accionamientos de avance.
Posicionado con ciclos rápidos.
Maquinaria de propósito general.
Robótica.
Inconvenientes:
Potencia limitada.
CARACTERÍSTICAS BÁSICAS
Servomotor brushless AC

7
Un accionamiento de avance (servoaccionamiento) es reversible, operando en los cuatro cuadrantes.
En los cuadrantes 2 y 4 el motor opera en frenado regenerativo. Debe tenerse en cuenta la energía regenerativa que se produce durante el frenado.
(Gp:) Par
(Gp:) n
T
(Gp:) n
T
(Gp:) n
T
(Gp:) n
T
(Gp:) Velocidad
(Gp:) 2 1
3 4
Operación en cuatro cuadrantes.
CARACTERÍSTICAS BÁSICAS

8
Par de pico en aceleración (para vencer par resistente y par dinámico).
Velocidad = consigna ? Par de motor = Par resistente
Frenada (pico de par menor porque el par resistente ayuda a frenar).
El ciclo de trabajo define la evolución del par y de la velocidad en el eje del motor en función del tiempo.
CARACTERÍSTICAS BÁSICAS
Ciclo de trabajo típico de un accionamiento de avance:
Ciclo de trabajo
(Gp:) Velocidad
(Gp:) Par
(Gp:) t
(Gp:) t
Página siguiente  |