
Introducción
Primer acercamiento al funcionamiento de un helicóptero.
Problema de control que propone un desafio interesante.
Sistema vistoso y llamativo por sus movimientos.
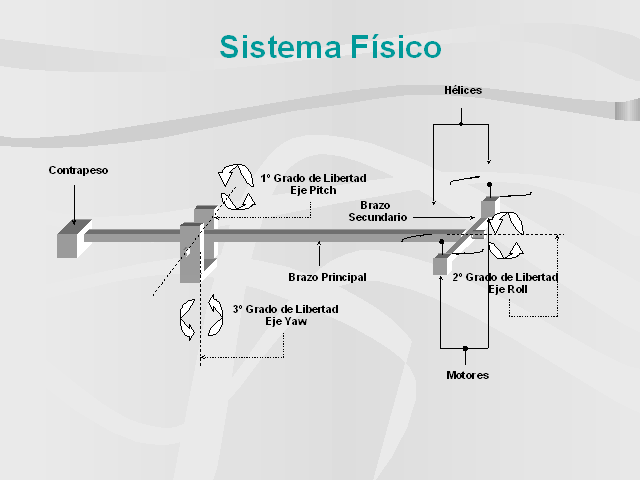
Sistema Físico
(Gp:) Hélices
(Gp:) Contrapeso
(Gp:) Brazo Secundario
(Gp:) 1º Grado de Libertad
Eje Pitch
(Gp:) 3º Grado de Libertad
Eje Yaw
(Gp:) 2º Grado de Libertad
Eje Roll
(Gp:) Motores
(Gp:) Brazo Principal
Objetivos
Construcción de un prototipo que tenga un desempeño aceptable en el movimiento de sus ejes.
Registrar la magnitud de movimientos en cada uno de los ejes.
Contar con los actuadores indicados para accionar correctamente sobre el sistema.
Objetivos del Prototipo
Obtener un control simple y con desempeño eficiente para el primer grado de libertad.
Control simple y eficiente para el primer y segundo grado de libertad conjuntamente.
Control del tercer grado de libertad.
Objetivos del control

Modelo matemático del sistema
La modelización es el primer paso en el diseño de un lazo de control,hay dos principios fundamentales para conocer la dinámica del sistema.
Deducir su comportamiento a partir de las leyes físicas que lo rigen. Ecuaciones de Newton-Euler.
Excitar el sistema con una señal y observar o medir su comportamiento frente a este estímulo. Respuesta a un escalón.

Primer grado de libertad Eje Pitch
Angulo de Pitch
=
f
(Gp:) Masa
(Gp:) de
(Gp:) Centro
(Gp:) Inercia
(Gp:) I
(Gp:) Pitch
(Gp:) eje
(Gp:) el
(Gp:) para
(Gp:) resorte
(Gp:) de
(Gp:) Constante
(Gp:) S
(Gp:) Pitch
(Gp:) eje
(Gp:) el
(Gp:) en
(Gp:) Roce
(Gp:) B
(Gp:) cm
(Gp:) P
(Gp:) P
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) Pitch
(Gp:) eje
(Gp:) el
(Gp:) para
(Gp:) Inercia
(Gp:) J
(Gp:) P
(Gp:) =
(Gp:) F
(Gp:) F
(Gp:) F
(Gp:) P
(Gp:) ±
(Gp:) ±
(Gp:) =
(Gp:) 1
(Gp:) 2

(Gp:) S
(Gp:) B
(Gp:) l
(Gp:) g
(Gp:) M
(Gp:) l
(Gp:) g
(Gp:) M
(Gp:) l
(Gp:) F
(Gp:) J
(Gp:) l
(Gp:) M
(Gp:) I
(Gp:) l
(Gp:) M
(Gp:) J
(Gp:) P
(Gp:) P
(Gp:) p
(Gp:) P
(Gp:) cm
(Gp:) P
(Gp:) –
(Gp:) –
(Gp:) –
(Gp:) +
(Gp:) =
(Gp:) +
(Gp:) +
(Gp:) =
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) .
(Gp:) 2
(Gp:) 2
(Gp:) 1
(Gp:) 1
(Gp:) 2
(Gp:) ..
(Gp:) 2
(Gp:) 2
(Gp:) 2
(Gp:) 2
(Gp:) 1
(Gp:) 1
(Gp:) )
(Gp:) cos(
(Gp:) )
(Gp:) cos(
(Gp:) )
(Gp:) (
(Gp:) El sistema es no lineal
(Gp:) P
(Gp:) w
(Gp:) x
(Gp:) x
(Gp:) x
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) 2
(Gp:) .
(Gp:) 1
(Gp:) .
(Gp:) 1
(Gp:) f
(Gp:) f
(Gp:) )
(Gp:) cos(
(Gp:) )
(Gp:) cos(
(Gp:) .
(Gp:) 2
(Gp:) 2
(Gp:) 1
(Gp:) 1
(Gp:) 2
(Gp:) .
(Gp:) .
(Gp:) J
(Gp:) S
(Gp:) B
(Gp:) l
(Gp:) g
(Gp:) M
(Gp:) l
(Gp:) g
(Gp:) M
(Gp:) l
(Gp:) F
(Gp:) w
(Gp:) w
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) ï
(Gp:) ï
(Gp:) î
(Gp:) ï
(Gp:) ï
(Gp:) í
(Gp:) ì
(Gp:) –
(Gp:) –
(Gp:) –
(Gp:) +
(Gp:) =
(Gp:) =
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
Modelo de estados

En nuestra planta la barra se encuentra en la condición de equilibrio de torques, es decir:
(Gp:) = 0°
(Gp:) f
De esta forma:
Ya que:
Finalmente:

Esto se ve en el problema de la palanca que es una de las maquinas fundamentales:
(Gp:) Caso c
Consideramos a M1 y M2 las masas resultantes de la distribución de mp .
Para el Caso a se cumple que:
En la condición de que:
Entonces para: la posición del brazo es del Caso b.
Finalmente: la posición del brazo es del Caso c.
Los valores de las masas y las longitudes se ajustaron para que el brazo en reposo
tengan como condición inicial la posición del brazo en el Caso a.

Finalmente el sistema en ecuaciones de estados es:
El sistema es lineal
J
P
î
(Gp:) .
(Gp:) 2
(Gp:) .
(Gp:) .
(Gp:) 2
(Gp:) .
(Gp:) 1
(Gp:) .
(Gp:) 1
(Gp:) S
(Gp:) B
(Gp:) l
(Gp:) F
(Gp:) w
(Gp:) w
(Gp:) w
(Gp:) x
(Gp:) x
(Gp:) x
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) P
(Gp:) ï
(Gp:) ï
(Gp:) ï
(Gp:) ï
(Gp:) í
(Gp:) ì
(Gp:) –
(Gp:) –
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) =
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
(Gp:) f
Variables de Estados Tomamos
Variables de Entrada Variables de Salida

Segundo grado de libertad Eje Roll

Modelo de Estados
Variables de Estados
Variables de Entrada
Variable de Salida
Tomamos:

Tercer grado de libertad Eje Yaw
(Gp:)
Eje de Yaw

Modelo de Estados
Variables de Estados
Variables de Entrada
Variable de Salida

Modelo de Estados . Sistema Completo
Variables de Estados

Variables de Entrada
Variables de Salida
Magnitudes:

Descripción del sistema
Controlador del sistema.
Actuador para los motores.
Sensores de ángulos.

Controlador del sistema
A través de una PC utilizando una placa adquisidora de datos Múltiple.
Programa de simulación y control. Matlab, Simulink, Real Time Workshop, Real Time Windows Target
Las S_Functions son programas que permiten la interacción entre la placa y el Simulink.

Esquema del controlador

Actuador
Los dos motores de corriente continua con las hélices

Saturación de la actuación
Limita actuaciones demasiadas elevadas debido a cambios bruscos de la referencia o picos elevados de la señal de control.

Generación de PWM
Es la técnica mas usada para accionar sobre motores de c.c. con un tren de pulsos de periodo constante, pero el ancho de los pulsos es variable.

Relación PWM(%) Vs Tensión(V)

Identificación del comportamiento del actuador
La hélice varia su empuje de acuerdo a la velocidad que este girando y su sentido.

Relación No lineal Tensión Vs Empuje

Puente H
Es el encargado del sentido de giro en los motores según la actuación entregada por el controlador.

Sensores
PITCH
ROLL
Medición de Angulo (Pitch y Roll)

Sensores

Sensores
Medición de giro(Yaw)
Encoder incremental
Pulsos por revolución PPR: 3000
Rango de Tensión : 5V– 24V
Consumo de corriente: 80 mA típico
Vida útil: 100.000 hrs
Peso: 200 grs

Sensores
Entrega dos señales de cuadratura desfasadas una respecto de la otra que informan la posición y sentido de giro

Simulación del sistema
Sistema Pitch
Obtuvimos en forma experimental los coeficientes que no pudimos medir:
Bp: Roce en el eje Pitch
Jp: Inercia sobre eje Pitch
Sp: Constante de resorte

Comparación de repuesta Real y Simulada para el Sistema Pitch sin actuación
Ensayo a lazo abierto con condición inicial distinta a la del punto de equilibrio
Condición inicial: 40°

Comparación de Respuesta al Escalón del sistema real y simulado a Lazo Abierto
Respuesta a una entrada escalón de un 40% de modulación del PWM
(Gp:) Escalón
Tensión directa:
3,25 Volt a cada motor.
(Gp:) Empuje de hélice:

Análisis del sistema
Tomando la representación en variables de estado del sistema, observamos que la matriz:
Tiene los siguientes autovalores:
Como podemos ver tiene autovalores complejos conjugados, con parte real negativa.
Función transferencia:
Polos a lazo abierto:

Lugar de las raices

Ejemplo de control

Control Sistema Pitch
La estructura de control elegida para los sistemas es el PID,la razón de esta elección es por ser el más usado en la industria y ha mostrado ser robusto y extremadamente beneficioso en el control de muchas aplicaciones industriales en lazo cerrado.
(Gp:) Donde su forma estándar es:
(Gp:) tiempo de integración
PID significa:
Proporcional
Integral
Derivativo

Ajuste PID
Para sintonizar el PID se utilizo el método de oscilación de Ziegler-Nichols.Se simulo el modelo matemático discreto.


Controlador PID con Acción Antireset Wind Up

Rechazo a perturbaciones
Perturbación instantanea
Hay perturbaciones de distinta naturaleza, por ejemplo un helicóptero estaría expuesto a corrientes térmicas ó ráfagas de viento. Evaluamos el desempeño del control.

Perturbación Constante
Se implemento con un peso Mp aplicado en el extremo donde se encuentra el brazo secundario

Diagrama de simulación y control de Sistema Pitch

Control Sistema Roll
El segundo grado de libertad del sistema, el eje Roll, es el que da la posibilidad de lograr el movimiento en el tercer grado de libertad, eje Yaw. Para sintonizar el PID se utilizo el método de oscilación de Ziegler-Nichols.Se ensayo sobre la planta real.


Diagrama de Control Roll

Rechazo a perturbaciones

Control Sistema Completo
Para controlar el sistema completo se implementaron además de los esquemas anteriormente explicados para el movimiento de Pitch y Roll, un PID con acción Antireset wind up, los valores para su sintonización fueron establecidos a prueba y error. El esquema de control es el siguiente:

Conclusiones
Eje de menor diámetro para minimizar el roce en el movimiento de Roll.
Ventajas al trabajar con un software de tiempo real.
Desempeño aceptable del PID para Pitch y Roll.
Controles más avanzados para el sistema completo (mejores sensores).
Resolucion limitada de registros por conversor de placa adquisidora.
Ventajas y desventajas del PWM implementado por software.
Anillos deslizantes para el eje Yaw.

Motivación para continuidad de este proyecto
En la mayoría de la bibliografia y apuntes consultados para este trabajo se proponen como control para el sistema métodos avanzados, como por redes neuronales, lógica difusa, control no lineal, etc. Además se aconseja utilizar control adaptativo. De esta forma el proyecto elaborado hasta este paso esta en condiciones de una continuación donde el objetivo sea emplear uno de estos métodos para lograr una mejor performance en el control para cada uno de los grados de libertad. Se podría decir que el prototipo logrado es un material didáctico interesante para aplicar los conocimientos adquiridos en cada una de las cátedras de control que se dictan en la carrera, muchas de las cuales abarcan los métodos anteriormente mencionados.