Indice
Sub 6.1. Especificaciones de diseño
6.2. Diseño de reguladores de cancelación: Truxal
6.3. Acciones de control clásicas: Reguladores PID
6.4. Diseño de reguladores PID
6.5. Control de las perturbaciones

Diseño de Reguladores en el Dominio del Tiempo
Sub1) Determinar qué debe hacer el sistema y cómo debe hacerlo: Especificaciones de diseño.
2) Determinar la configuración de la estructura de control y el tipo de regulador.
3) Determinar los parámetros del regulador para alcanzar los objetivos de diseño.

Especificaciones de Diseño en el Dominio del Tiempo
Sub Precisión en régimen permanente: ep, ev y ea.
Respuesta transitoria: Mp, tp, tr, ts.
Control de las perturbaciones.
NOTA: Existen relaciones analíticas para los parámetros de respuesta transitoria (Mp, tp, tr, ts) sólo para sistemas de segundo orden sin ceros o sistemas que se puedan aproximar por sistemas de segundo orden. Los procedimientos generales de diseño que se describirán son aplicables a estos sistemas y pueden no ser del todo válidos para sistemas de orden superior.
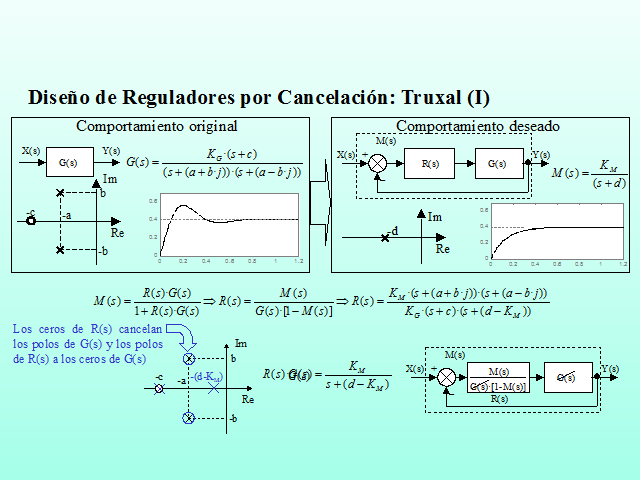
Diseño de Reguladores por Cancelación: Truxal (I)
SubComportamiento original
Comportamiento deseado
(Gp:) Re
(Gp:) Im
(Gp:) -c
(Gp:) -a
(Gp:) b
(Gp:) -b
(Gp:) -(d-KM)
(Gp:) Los ceros de R(s) cancelan los polos de G(s) y los polos de R(s) a los ceros de G(s)
Diseño de Reguladores por Cancelación: Truxal (II)
SubInconvenientes:
1) R(s) ha de ser realizable, nR ? mR. Esto se consigue si nM-mM ? nG-mG.
2) La cancelación de polos y ceros no es exacta. Por lo tanto G(s) tiene que ser de fase mínima para que el sistema final no tenga polos inestables.
3) R(s) puede ser muy complicada (muchos ceros y polos).

Acciones de Control Clásicas
Sub1- Proporcional
2- Integral
3- Diferencial
–
5
0
5
10
15
20
25
30
–
0.4
–
0.2
0
0.2
0.4
0.6
0.8
1
–
5
0
5
10
15
20
25
30
0
x(t)
0.4
0.6
0.8
1
1.2
1.4
y(t)
e(t)
–
5
0
5
10
15
20
25
30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
–
5
0
5
10
15
20
25
30
–
2
–
1.6
–
1.2
–
0.8
–
0.4
0
0.4
0.8
1.2
1.6
2

Reguladores PID (I)
SubRegulador I
Regulador P
Regulador D
El comportamiento ideal del derivador es imposible de reproducir físicamente
Respuesta ante un escalón unitario
Representación típica en circuitos de control
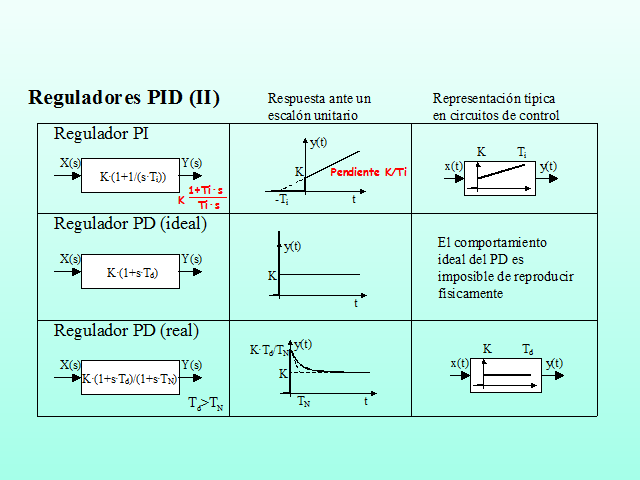
Reguladores PID (II)
SubRegulador PD (ideal)
Regulador PI
Regulador PD (real)
El comportamiento ideal del PD es imposible de reproducir físicamente
Respuesta ante un escalón unitario
Representación típica en circuitos de control
Td>TN
K
1+Ti·s
Ti·s
Pendiente K/Ti

Reguladores PID (III)
SubRegulador PID (ideal)
Regulador PID (real)
El comportamiento ideal del PID es imposible de reproducir físicamente
Respuesta ante un escalón unitario
Representación típica en circuitos de control
Ti>Td>TN
Ti>Td
Pendiente K/Ti
Pendiente K/Ti

Implementación de Reguladores Electrónicos
NOTA: Las ecuaciones suponen un comportamiento ideal de los componentes electrónicos, es decir, sin saturaciones, respuesta inmediata, parámetros constantes, circuitos operacionales ideales, resistencias y condensadores puros, etc.

Regulador P

Regulador I
Página siguiente  |