
1
Índice: Sensores
Introducción
Clasificación de los sensores
Sensores internos
Posición y orientación
Velocidad
Aceleración
Sensores externos
Proximidad
Fuerza-par
Táctiles
Visión artificial
Tratamiento de imágenes
Integración de sensores

2
Introducción (i)
Los sensores son los dispositivos que permiten a un robot percibir su entorno.
Un sensor es un transductor que convierte algún fenómeno físico en señales eléctricas que el micro-procesador del robot puede leer.
La misma propiedad física puede medirse por varios sensores.
En general son limitados e inexactos.
La sensorización de un robot implica diversas disciplinas:
Electrónica: Un sensor de colisión (detectar si pasa o no corriente)
Procesamiento de señales: Un micrófono (separar la voz del ruido)
Informática: Una cámara devuelve un imagen (reconocer los objetos que la forman)
Un diseñador de robots generalmente no puede crear nuevos sensores.
Nuestro trabajo consistirá en integrar los sensores existentes
Esta integración debe hacerse sin perder de vista la tarea a realizar.

3
Introducción (ii)
Algunas definiciones que debemos conocer:
Sensibilidad: Es una medida del grado de variación de la señal enviada conforme el fenómeno medido ha cambiado.
Precisión: Diferencia entre el valor real y el medido.
Repetitividad: Diferencia entre sucesivas medidas de la misma entrada.
Resolución: Incremento mínimo observable en la entrada.
Rango: Diferencia entre el máximo y mínimo valor medible.
4
Clasificación de los sensores
Vamos a clasificar los sensores en dos grandes grupos:
Sensores internos: Nos da información sobre el propio robot.
Posición y orientación
Velocidad
Aceleración
Sensores externos: Nos da información sobre el entorno del robot.
Proximidad
Tacto
Fuerza
Visión
Otra clasificación:
Sensores pasivos: Miden señales del entorno.
Sensores activos: Producen un estímulo y miden su interacción en el entorno.
El sensor consta de un emisor y un receptor.
Necesitan más energía y en general más complejidad.

5
Sensores internos (i)
Posición y orientación
Indican en que posición se encuentra un elemento del robot.
Potenciómetros.
Un contacto que se mueve sobre una espiral.
Dan bajas prestaciones (mucho ruido, poca precisión, etc.)
No se suelen usar salvo en contadas ocasiones (robots educacionales, ejes de poca importancia)
Encoders (Codificadores angulares de posición)
Diodo LED (emisor) más fototransistor (receptor)
Miden el número de grados que gira algo (motor).
Marcar el elemento que gira (p.e. haciendo agujeros a un disco)
Resolución: número de agujeros
Otra técnica: pintar sectores blancos y negros y medir reflexión
Se obtiene una onda que puede procesarse
¿Cómo detectar el cambio de dirección?: dos canales.
Ruido de los efectores (las ruedas patinan y deslizan)
Resolvers y sincros
6
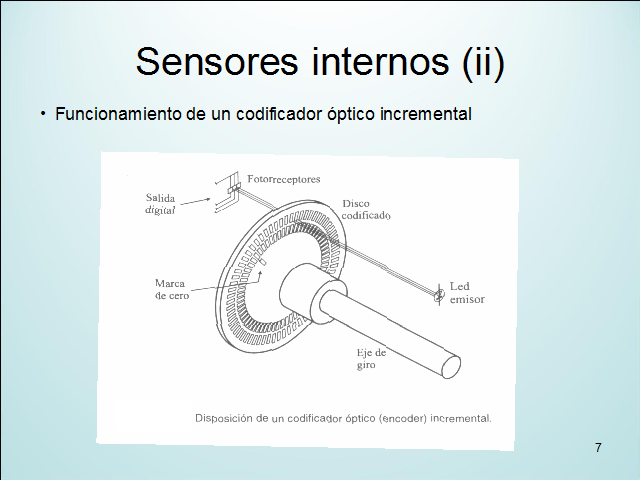
Sensores internos (ii)
Funcionamiento de un codificador óptico incremental

7
Sensores internos (iii): usados normalmente en campo abierto
Brújulas: proporcionan información absoluta sobre la orientación de un vehículo
Una aguja imantada se alínea hacia el norte magnético
Existen diversos tipos de brújulas
Magnéticas
Electrónicas (dispositivos de estado sólido)
Inclinómetros: ayudan a determinar si el robot está inclinado.
Giroscopios: determinan la velocidad de rotación y la distancia rotada.
GPS (Global Positioning System)
sistema de orientación/navegación desarrollado y administrado por el US DOD (Departament of Defense).
La información enviada por al menos 4 satélites (señales codificadas), son procesadas por un receptor GPS para calcular su posición (3D), velocidad y tiempo.
Principales usos: navegación aérea y marítima, seguridad vehículos terrestres.

8
Sensores internos (iv)
Velocidad
Miden la velocidad (generalmente angular)
Eléctricos:
Dinamo (Una bobina que gira perpendicularmente a un campo magnético)
Se genera tensión proporcional a la velocidad de giro
Varios nombres: tacogenerador, tacómetro, tacodinamo, etc
Ópticos:
Usan los sensores de posición, derivando para calcular la velocidad
Aceleración
Usan la inercia: un muelle que se estira
Cada vez se usan más (uso clásico: aviones)
La integral numérica es mucho más exacta que la derivada
Problema de oscilación (falsas medidas)

9
Sensores externos (i)
Proximidad
Son usados para determinar la presencia de objetos cercanos. Existen muchos tipos:
Ultrasonidos
Magnéticos
Inductivos
Micro-ondas
Ópticos
Capacitivos
10
Sensores externos (ii)
Ultrasonidos
Uno de los sensores más utilizados en robots móviles.
Sensor activo de reflexión (el emisor y el receptor se colocan juntos y detectan la reflexión de los objetos)
Se emiten ultrasonidos (20-200 KHz) y se capta en un micrófono el reflejo. La diferencia entre ambas señales indica la distancia al objeto.
Ultrasonidos viajan aprox. 35 cm/ms.
Propiedades estándar:
Rango de 10 m (aprox.)
30 grados de amplitud
Devuelven distancia al objeto más próximo
Combinables en arrays con desfases entre ellos (más precisos)

11
Sensores externos (iii)
Desventajas:
La posición real del objeto es desconocida (cualquier posición del cono a distancia d).
Cuanto menor sea el ángulo, mayor es la probabilidad de perderse y producir falsas medidas de gran longitud.
Cuanto mayor es el ángulo, más probabilidad de que se detecte un objeto no deseado.
Las superficies pulidas agravan el problema (las rugosas producen reflejos que llegan antes).
En resumen: las medidas de objetos lejanos pueden ser muy erróneas.
Ejemplo: un robot que se acerca a una pared con muy poco ángulo puede “no verla”.
¿Qué ocurre cuando varios robots usan ultrasonidos?.

12
Sensores externos (iv)
Ópticos
Muy utilizados en aplicaciones industriales
Sensor activo de reflexión (existen tambien de barrera, pero estos no pueden ser considerados de proximidad)
Se emite luz y se captan los rebotes mediante fotodiodos o fototransistores (las fotoresistencias son más lentas)
Se utilizan para:
Detectar la presencia de objetos
Medir la distancia a los objetos
Detección de características: encontrar una marca, seguir una línea, etc.
Lectura de códigos de barras
Existen distintos tipos de sensores, en función del tipo de luz con la que trabaja:
Luz en el espectro visible
Infrarrojos
Láser
Página siguiente  |