
Impacto de los modos característicos
La respuesta de entrada cero consiste de los modos característicos del sistema
Sistema estable ? modos característicos decaen de manera exponencial y eventualmente se hacen cero
13

Impacto de los modos característicos
Si la entrada tiene la forma de un modo característico, entonces el sistema respondera enérgicamente
Si la entrada es muy diferente de los modos característicos, entonces la respuesta sera débil
14

Impacto de los modos característicos
Ejemplo: sistema escalar de primer-orden con el modo característico elt, condiciones iniciales cero, D = 0
Tres casos
15

Modos no observables
El par (A,C) no es observable si y solo si para algún vector propio vk de A se cumple,
Prueba: El par (A,C) es no obserbable si existe un estado no observable x*. Entonces
Seleccionando el estado inicial
16

Modos no observables
Prueba: Los vectores propios forman un base por lo tanto cualesquier vector x0 ? 0 (en particular si x0 es no observable) puede ser generado a partir de
Asi,
Dado que x0 ? 0, entonces algun ak ? 0, entonces
17

Modos no controlables
El par (A,B) no es controlable si para algún vector propio wk de AT se cumple,
Prueba: El par (A,B) es no controlable si existe un estado no controlable x*. Entonces
Seleccionando el estado inicial
18
Se dice que wk es un vector propio por la izquierda de A
etc…

La descomposicion canonica y los modos
En terminos de los modos, en la descomposicion canonica se tienen entonces:
Modos controlables y observables
Modos controlables y no observables
Modos no controlables y observables
Modos no controlables y no observables
19
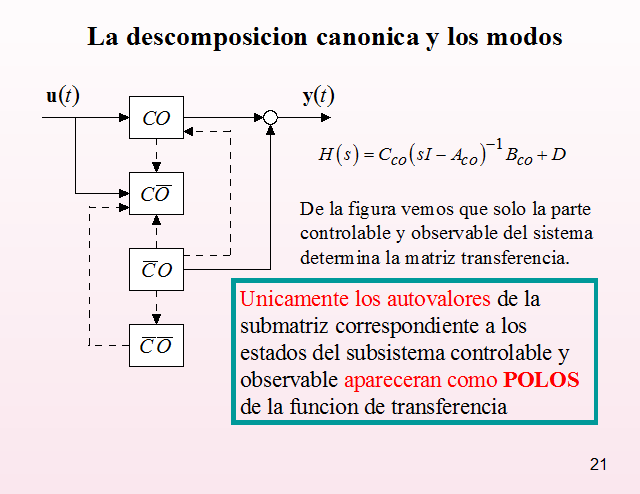
La descomposicion canonica y los modos
20
De la figura vemos que solo la parte controlable y observable del sistema determina la matriz transferencia.
Unicamente los autovalores de la submatriz correspondiente a los estados del subsistema controlable y observable apareceran como POLOS de la funcion de transferencia

La descomposicion canonica
21
Por lo tanto la representacion en matriz tranferencia (representacion externa) no es necesariamente equivalente a la representacion en espacio de estados ( representacion interna).

La descomposicion canonica
22
El subsistema observable y controlable, tomado como realizacion de la funcion de transferencia del sistema, es una realizacion minima, puesto que no puede obtenerse otra realizacion de orden menor con la misma funcion de tranferencia.

Estabilidad interna de los sistemas lineales
23

El concepto de estabilidad
En general, la estabilidad interna describe las propiedades de convergencia de las trayectorias cercanas a estados de equilibrio del sistema
Para sistemas lineales, existe un solo estado de equilibrio aislado : el origen
24
(Gp:) Los estados de equilibrio del sistema x = f(x) a son los puntos xe tales que f(xe) = 0.

El concepto de estabilidad
En un estado de equilibrio estable, la presencia de un cambio pequeño en las entradas o condiciones iniciales tendra como resultado pequeñas modificaciones en su respuesta perturbada.
25
(Gp:) Time

El concepto de estabilidad
Por otro lado, en un estado de equilibrio inestable cualquier perturbacion, por pequeña que sea, llevara a los estados a alejarse cada vez mas
26
(Gp:) Time

Ejemplo
27
Estabilidad de los puntos de equilibrio
Eq #1 es estable
Eq #3 es inestable
Eq #2 and #4 son inestables, pero con algunos “modos” estables
Eq #1
Eq #2
Eq #3
Eq #4
El doble pendulo invertido (sistema no lineal)

Estabilidad interna de sistemas LTI
La estabilidad interna es un concepto especial de los sistemas lineales de la forma:
Y la definicion de estabilidad interna se hace para cualquier solucion del sistema no forzado
28

Estabilidad en el sentido de Lyapunov
Definicion (Estabilidad en el sentido de Lyapunov).
El (punto de equilibrio del) sistema es internamente estable en el sentido de Lyapunov, o simplemente estable,
si toda condicion inicial finita origina una trayectoria acotada.
29
para toda solucion x(t), x(0) = x0

Estabilidad Exponencial
Definicion (Estabilidad Exponencial).
El sistema es exponencialmente estable si existen constantes positivas ? y ? tales que
toda condicion inicial finita origina una trayectoria acotada que ademas tiende al origen cuando
30
para toda solucion x(t), x(0) = x0
Definicion: El sistema es inestable si no es estable

Ejemplo: estabilidad asintotica
31
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) -0.5
(Gp:) 0
(Gp:) 0.5
(Gp:) 1
(Gp:) x
(Gp:) 1
(Gp:) x
(Gp:) 2
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) -0.5
(Gp:) 0
(Gp:) 0.5
(Gp:) 1
(Gp:) x
(Gp:) 1
(Gp:) x
(Gp:) 2
En las graficas se muestra la dinamica de los estados como campos vectoriales

Estabilidad de un punto de equilibrio
32
Asintoticamene estable si todas las condiciones iniciales cercanas convergen al punto de equlilibrio
El punto de equilibrio es un atractor
Inestable si algunas condiciones iniciales divergen del punto de equilibrio
El punto de equilibrio es una fuente
Estable si las condiciones iniciales cercanas permanecen cerca del punto de equilibrio
El punto de equilibrio es un centro
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) -0.5
(Gp:) 0
(Gp:) 0.5
(Gp:) 1
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) -0.5
(Gp:) 0
(Gp:) 0.5
(Gp:) 1
(Gp:) 0
(Gp:) 5
(Gp:) 10
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) 0
(Gp:) 5
(Gp:) 10
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) 0
(Gp:) 5
(Gp:) 10
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) 0
(Gp:) 1
(Gp:) -1
(Gp:) -0.5
(Gp:) 0
(Gp:) 0.5
(Gp:) 1

Teorema de la estabilidad interna
El sistema es internamente inestable si algun autovalor de A tiene parte real positiva (pertenece al semiplano derecho del plano complejo).
Prueba: en este caso, hay un valor propio con el correspondiente vector propio que da respuestas reales
33
Claramente estas soluciones no estan acotadas cuando ya que

Teorema de la estabilidad interna
El sistema es asintoticamente estable si y solo si todos los autovalores de A tienen parte real negativa (pertenecen al semiplano izquierdo del plano complejo).
Prueba: Si todos los autovalores estan en entonces cualquier solucion sera una combinacion lineal de n funciones vectoriales de la forma
34
(Gp:) Claramente estas soluciones tienden a cero cuando ya que
Se dice que la matriz A es Hurwitz si todos sus autovalores tienen parte real negativa

Teorema de la estabilidad interna
El sistema estable en el sentido de Lyapunov si y solo si todos los autovalores de A tienen parte real no positiva, y para aquellos con parte real cero (sobre el eje imaginario) su multiplicidad aritmetica es igual a su multiplicidad geometrica.
Prueba: Si todos los autovalores tienen parte real cero, y su multiplicidad aritmetica es igual a su multiplicidad geometrica, entonces la solucion tiene la forma
De no ser asi, mg < ma, y la solucion tiene la forma
35
Es inestable

Lyapunov y la estabilidad de los sistemas lineales
36

Análisis basado de la estabilidad en la energía
Ejemplo: sistema masa-resorte-amortiguador
37
Energía = Energía cinética + Energía potencial
¿Convergen las trayectorias al punto de equilibrio?

Análisis basado de la estabilidad en la energía
Si no existiese amortiguamiento (c = 0), la energía aplicada en t = 0 se conservaría en el sistema ya que no existiría disipación.
Como consecuencia del amortiguamiento, la energía se disipa y las trayectorias van pasando por curvas de equi-energía de menor nivel hasta llegar al punto de equilibrio (el origen)
38

Análisis basado de la estabilidad en la energía
Al evaluar la función de energía a lo largo de una trayectoria de sistema,
En este caso, la energia decae a cero, y cada variable de estado decae a cero cuanto el tiempo tiende a infinito
39

Los metodos de Lyapunov
Los metodos de Lyapunov permiten determinar la estabilidad de sistemas de ecuaciones diferenciales sin necesidad de calcular explicitamente las soluciones
Se basan en las propiedades de una función V(x) (función de Lyapunov ) de los estados del sistema
V(x) es una funcion escalar real definida en una región acotada y cerrada en el espacio x que contiene al origen, tal que,
40

Teoremas de Lyapunov
El punto de equilibrio x = 0 del sistema es estable en la región S al rededor del origen si:
Existe una fucion V(x) > 0 (definida positiva) en S
Con (semidefinida negativa) en S a lo largo de la solucion del sistema
41
El teorema solo da condiciones suficientes de estabilidad y no condiciones necesarias.

Teoremas de Lyapunov
El punto de equilibrio x = 0 del sistema es asintoticamente estable en la región S al rededor del origen si:
Existe una fucion V(x) > 0 (definida positiva) en S
Con (definida negativa) en S a lo largo de la solucion del sistema
42
El teorema solo da condiciones suficientes de estabilidad y no condiciones necesarias.

Matrices definidas positivas
Una matriz cuadrada M es definida positiva si
Es semidefinida positiva si
El escalar xTMx es llamado una forma cuadratica
43
Para todo x ? 0
Para todo x ? 0

Matrices definidas positivas
Una matriz simetrica M = MT es definida positiva si y solo si sus valores propioes ?i > 0. (semidefinida ? ?i = 0)
Prueba (?): Sea vi el vector propio para el i-esimo valor propio ?i
Entonces,
lo cual implica ?i > 0,
44
Probar que eigenvalues positivos implica que la matriz es definida positiva.

Aplicación a los sistemas lineales
Sea un sistema lineal y una matriz definida positiva P, entonces
45
es una funcion de Lypunov

Aplicación a los sistemas lineales
Sea un sistema lineal , probemos como funcion de Lypunov , entonces
Observamos que es tambien una forma cuadrática en terminos de la matriz simétrica AT+PA.
Por lo tanto, una condicion suficiente para estabilidad asintotica es la existencia de una matriz definida positiva P para la cual AT+PA es definida negativa
46

Teorema de Lyapunov
Teorema: Para cualquier matriz definida positiva Q, la ecuacion de Lyapunov
Tiene una unica solucion P, simetrica definida positiva, si y solo si todos los valores propios de A tienen parte real estrictamente negativa
47
Prueba: ver texto

Estabilidad externa de los sistemas lineales
48

Estabilidad de entrada-salida
Definicion (Estabilidad de entrada- acotada/salida-acotada (BIBO))
Un sistema (A,B,C,D) es estable BIBO (entrada-acotada/salida-acotada) si toda entrada acotada produce una salida acotada, con condiciones iniciales nulas.
49

Estabilidad de entrada-salida
Teorema: El sistema (A,B,C,D) es BIBO estable si y solamente si la respuesta impulsiva h(t) = CeAtB+ Dd(t) satisface
50
Prueba: Sea la entrada u(t) acotada, |u(t)| = k1 < ?, ? t = 0. Entonces

Estabilidad de entrada-salida
Teorema: El sistema (A,B,C,D) es BIBO estable si y solamente si la respuesta impulsiva h(t) = CeAtB+ Dd(t) satisface
51
Prueba: Suponga que h(t) no es absolutamente integrable. Entonces, para un sistema causal, LTI, con u(t) = k1 > 0 and h(t) > 0, t = 0,
t ? ?,
y(t) no es acotada aunque u(t) sea acotada

Funcion de transferencia
Teorema: un sistema dinámico LTI SISO es BIBO estable si y solamente si cada polo de su funcion de transferencia H(s) esta colocado sobre el semiplano izquierdo del plano s
52
Prueba: Sea H(s) una funcion racional propia de s, entonces cada polo localizado en s = – pi, pi > 0, tiene multiplicidad ni, tal que
Absolutamente integrable

Relaciones entre estabilidad externa e interna
Evidentemente, cada polo de H(s) es un valor propio de A.
Por lo tanto, si cada valor propio de A tiene parte real negativa, entonces todos los polos de H(s) estan en el semiplano izquierdo del plano s. Por lo tanto el sistema descrito por A es BIBO estable.
Sin embargo, no todo autovalor de A aparecera como polo de H(s), ya que puede haber modos no observables o no controlables
53
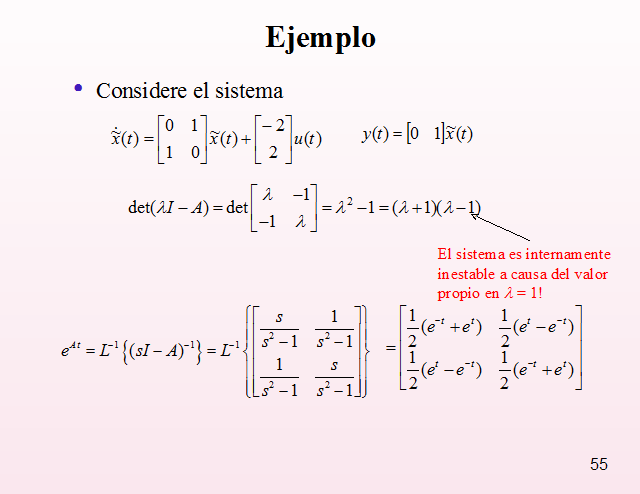
Ejemplo
Considere el sistema
54
El sistema es internamente inestable a causa del valor propio en ? = 1!

Ejemplo
Considere el sistema
55
Cancelacion de polos y ceros en el calculo de la funcion de transferencia
La respuesta impulsiva es
BIBO estable
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |