1
Sistemas electrónicos de medida y regulación:
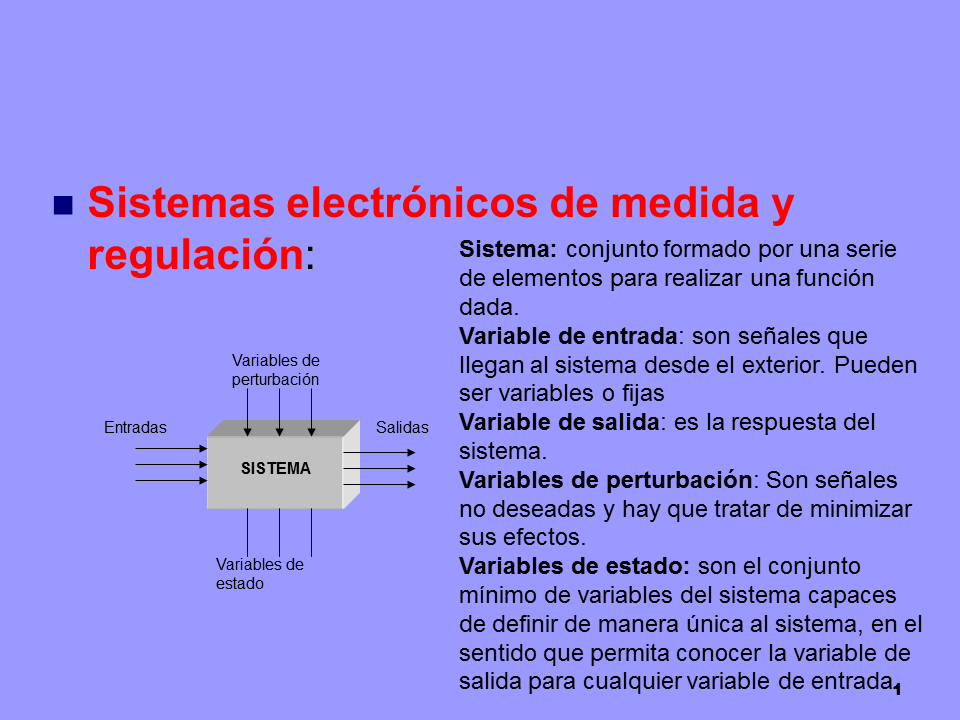
(Gp:) Entradas
(Gp:) Salidas
(Gp:) Variables de perturbación
(Gp:) Variables de estado
(Gp:) SISTEMA
Sistema: conjunto formado por una serie de elementos para realizar una función dada.
Variable de entrada: son señales que llegan al sistema desde el exterior. Pueden ser variables o fijas
Variable de salida: es la respuesta del sistema.
Variables de perturbación: Son señales no deseadas y hay que tratar de minimizar sus efectos.
Variables de estado: son el conjunto mínimo de variables del sistema capaces de definir de manera única al sistema, en el sentido que permita conocer la variable de salida para cualquier variable de entrada.
2
Sistemas electrónicos de medida y regulación:
Ejemplo:
Si se desea posicionar una antena mediante un mando eléctrico, la variable de entrada sería la tensión eléctrica suministrada al motor de giro por un operador. Una variable de perturbación sería el viento que podría modificar la posición alcanzada. La variable de salida sería la posición de la antena y las variables de estado las distintas posiciones del potenciómetro para cada posición de la antena.

3
Sistemas de control continuo:
(Gp:) CONTROL
(Gp:) PROCESO
(Gp:) E
(Gp:) S
(Gp:) Control
(Gp:) Proceso
(Gp:) Realimentación
(Gp:) Comparador
(Gp:) E
(Gp:) S
Sistemas de cadena abierta: no existe vigilancia sobre la señal de salida. Problema: es incapaz de resolver los problemas causados por las posibles perturbaciones
Sistema de cadena cerrada o realimentada: recibe información desde la salida para determinar si ésta se ha ejecutado correctamente. Para ello, se establece una realimentación desde la salida hacia la entrada.

4
Sistemas de control continuo:
Servosistema: sistema de cadena cerrada y entrada variable.
Servomecanismo: servosistema en el que la salida es una magnitud física como posición, velocidad, temperatura, etc. La estructura general de un servosistema es el siguiente:
(Gp:) Detector de error
(Gp:) Regulador
(Gp:) Accionador
(Gp:) Realimentación
(Gp:) Xe
(Gp:) S
(Gp:) Proceso
(Gp:) Transductor de salida
(Gp:) Transductor de entrada
(Gp:) Xs
(Gp:) Xc

5
Sistemas de control continuo:
Ejemplo: Un ejemplo práctico de servomecanismo puede ser un regulador de velocidad de un motor.
(Gp:) Regulador
(Gp:) Dinamo tacométrica
(Gp:) Verr
(Gp:) Vc
(Gp:) Motor
(Gp:) V

6
Sistemas de control continuo:
Función de transferencia: FDT
(Gp:) A
(Gp:) B
(Gp:) Xe
(Gp:) Xs
(Gp:) +
(Gp:) –
(Gp:) Comparador
FDT total: relaciona la señal de salida con la entrada. Indica la estabilidad del sistema.
FDT de error: relaciona la señal de error con la señal de entrada. Se utiliza para determinar la precisión de un servosistema.
FDT de lazo abierto: es la función de transferencia que se obtiene si al lazo cerrado se le desconecta la red de realimentación.

7
Sistemas de control por ordenador:CPC
Consiste en la introducción de un ordenador como elemento constituyente del sistema de control. De los elementos que componen un servosistema, el más importante era el regulador, ya que determinada muchas de las características del sistema. Se empieza a utilizar un ordenador como elemento regulador de control. Este hecho da lugar a las técnicas de análisis y diseño de sistemas de control digital, también denominadas sistemas muestreados o discretos de control.
(Gp:) Ordenador
(Gp:) Proceso
(Gp:) Realimentación
(Gp:) Xe
(Gp:) Xc
(Gp:) Xs
(Gp:) Xr

8
Sistemas de control por ordenador:CPC
El ordenador asume la función del comparador y del regulador analógico. La distinta naturaleza de las señales implica que debe existir otro bloque más, capaz de realizar la conversión entre ambos tipos de señales. Estos bloques están implementados físicamente por los convertidores analógicos-digitales (A/D) o digital-analógico (D/A). A estos bloques también se les denomina interfaces.
(Gp:) Ordenador
(Gp:) Proceso
(Gp:) Realimentación
(Gp:) Xe
(Gp:) Vcn
(Gp:) Vs(t)
(Gp:) Vr(t)
(Gp:) A/D
(Gp:) D/A
(Gp:) D/A
(Gp:) Vin
(Gp:) Ve(t)

9
Sistemas de control por ordenador:CPC
Ventajas:
Mayor calidad: se pueden obtener señales de control muy complejas a partir de las señales de error, sin necesidad de cambiar ningún elemento del sistema.
Mayor exactitud: esto se debe a la mayor capacidad de cálculo del ordenador.
Control múltiple: Un mismo elemento puede ser utilizado para realizar el control de varios procesos simultáneamente.
Mayor versatilidad del sistema: se puede cambiar la acción de control sin más que cambiar el programa en ejecución.
Acciones complementarias: es posible realizar una serie de acciones complementarias como visualización instantánea de todas las variables de proceso, presentación, análisis estadístico, simulaciones, etc.

10
Sistemas de control por ordenador:CPC
Inconveniente:
Seguridad de funcionamiento. Es habitual que un mismo ordenador realice esta función para distintos procesos, por lo que una avería del mismo, dejará todo el sistema paralizado. Suele aumentarse la seguridad duplicando o triplicando la alimentación, la programación, etc.

11
Sistemas de control por ordenador:CPC
Para evitar este problema se ha desarrollado el control analógico-digital o control de punto de referencia (DAC).
El ordenador está encargado únicamente de la generación de las señales de referencia. Estas señales actúan sobre comparadores de control continuo, que junto con los reguladores mantienen íntegro el concepto de control continuo. Para asegurar su funcionamiento, se realiza la conexión directa (by-pass) de las variables de entrada al comparador.
(Gp:) Ordenador
(Gp:) Proceso
(Gp:) Realimentación
(Gp:) Xe
(Gp:) Ven
(Gp:) Vr(t)
(Gp:) A/D
(Gp:) D/A
(Gp:) D/A
(Gp:) Vin
(Gp:) Ver(t)
(Gp:) Regulador
(Gp:) BY-PASS
(Gp:) Comparador
12
Sensores y transductores
El transductor es un dispositivo que convierte una señal de una forma física determinada en otra señal de forma física diferente. Es un dispositivo que convierte un tipo de energía en otro.
El sensor es un dispositivo que, a partir de la energía del medio donde se mide, da una señal de salida transducible, que es función de la variable medida.

13
Sensores y transductores
El transductor es un dispositivo que convierte una señal de una forma física determinada en otra señal de forma física diferente. Es un dispositivo que convierte un tipo de energía en otro.
El sensor es un dispositivo que, a partir de la energía del medio donde se mide, da una señal de salida transducible, que es función de la variable medida.

14
Sensores y transductores
El transductor es un dispositivo que convierte una señal de una forma física determinada en otra señal de forma física diferente. Es un dispositivo que convierte un tipo de energía en otro.
El sensor es un dispositivo que, a partir de la energía del medio donde se mide, da una señal de salida transducible, que es función de la variable medida.

15
Clasificación:
Señal de salida. Puede ser analógica o digital. En los analógicos, la información variará de forma continua, la información está en la amplitud (por ejemplo un potenciómetro). En una salida digital, la salida variará de forma discreta y hará que la transmisión de su salida sea más fácil (por ejemplo un codificador de posición).
Parámetro variable. Resistencia, capacidad, inductancia, añadiendo luego los sensores generadores de tensión, carga o corriente, y así se hablará de sensores de tipo resistivo, inductivo, capacitivo, etc.
Magnitud medida. Se habla así de sensores de posición, distancia, desplazamiento, temperatura, presión, fuerza, velocidad y presencia. Esta clasificación permite escoger el dispositivo correcto dentro de un sistema de control.

16
Elección de un sensor:
Magnitud a medir: conociendo cuál ha de ser el margen de medida, la exactitud deseada, la estabilidad, el tiempo de respuesta y las magnitudes que pueden interferir.
Características de alimentación: tensión, corriente, potencia disponible, frecuencia (si es alterna), estabilidad.
Características ambientales: teniendo en cuenta los márgenes del fabricante.
Otros factores: vida media, coste de fabricación, coste de mantenimiento, tiempo de instalación, situación en caso de fallo.
Página siguiente  |