
Objetivos
Diseñar un controlador inteligente, para un inversor de tensión monofásico, utilizando las herramientas del software MATLAB, a fin de analizar su desempeño frente a condiciones de carga lineal y no lineal.

Objetivos Específicos
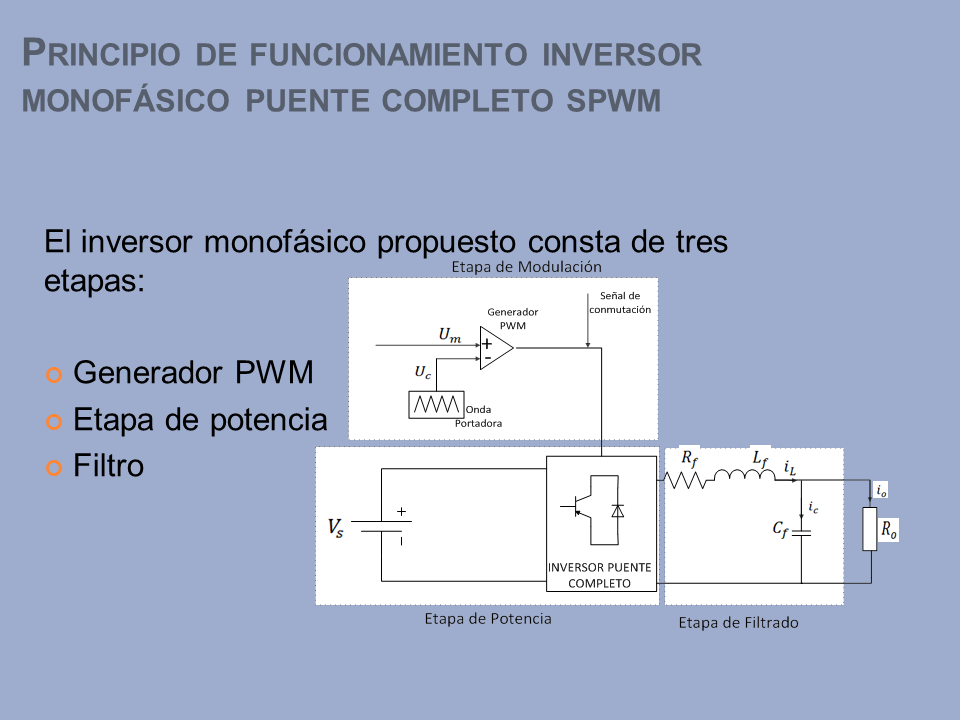
El inversor monofásico propuesto consta de tres etapas:
Generador PWM
Etapa de potencia
Filtro
Principio de funcionamiento inversor monofásico puente completo spwm

Generador pwm
El generador PWM es el encargado de entregar la señal de conmutación a los dispositivos semiconductores de potencia
Para la generación de pulsos se utiliza la modulación SPWM la cual consiste en comparar una onda senoidal de referencia con una onda portadora triangular de alta frecuencia.

Modulación SPWM
Los parámetros que caracterizan a la modulación senoidal por ancho de pulso son el índice de modulación en frecuencia y amplitud
Índice de modulación en amplitud
Índice de modulación en frecuencia

Etapa de Potencia
La etapa de potencia consta de los dispositivos semiconductores de conmutación, en este caso se modeló un sistema de conversión DC/AC tipo puente completo.

Etapa de Potencia

Filtro
Para obtener una forma de onda sinusoidal pura. Se necesitan filtros, generalmente LC pasa-bajos que eliminan las componentes armónicas que se presentan en bandas laterales a la frecuencia de la onda portadora.

Parámetros inversor

Parámetro de Calidad

Carga no Lineal
Para la medición de eficiencia del inversor bajo condiciones de carga crítica se diseñó un sistema no lineal el cual consta de un rectificador acompañado de cargas resistivas, capacitivas e inductivas

Modelo Matemático del inversor en Simulink

CONTROL PI
El controlador PI sirve como modelo de referencia para la construcción de los controladores inteligentes.
Variable Manipulada: Onda moduladora
Variable controlada: Tensión de Salida

Control PI
El controlador PI actúa sobre la onda de referencia u onda moduladora modificando el índice de modulación para compensar las corrientes armónicas que trabajan en los múltiplos de la frecuencia portadora de 6KHz.

Modelo simulink control pi
Página siguiente  |