Resumen
Este proyecto consiste en mantener la
velocidad de un motor de corriente continua ya
que estos se utilizan en su mayor parte para aplicaciones de
robótica por lo que es
necesario controlar su arranque y su velocidad para evitar
daños y movimientos erróneos, para eso se deben
utilizar varios bloques para realizar de manera optima esta
tarea, los bloques que se utilizaran son un oscilador que se
encargara de generar la señal para el movimiento, un puente H que
proporcionara la potencia para el movimiento y
sensores para determinar la
velocidad en la que gira el motor. También se mencionaran
los funcionamientos de otros dispositivos que se tomaron en
consideración para obtener resultados similares.
Introducción
Para el desarrollo del proyecto es
necesario tener un conocimiento básico de
los dispositivos que se utilizaran por lo que a continuación
se mencionan los que se utilizaran así también como los
que se consideraron para su elaboración.
Motores de Corriente
Continua
La característica de los motores de corriente directa es
la de transformar la energía eléctrica a
una forma mecánica, utilizando
bobinas e imanes, los que al ser activados generan un rechazo
entre ellos y eso es lo que hace que se mueva el rotor, este se
mueve ya sea en el sentido de las manecillas del reloj o en
contra de ellas de acuerdo a la polaridad de de la fuente. En la
Figura 1 se aprecian la forma más común de encontrar
motores CC
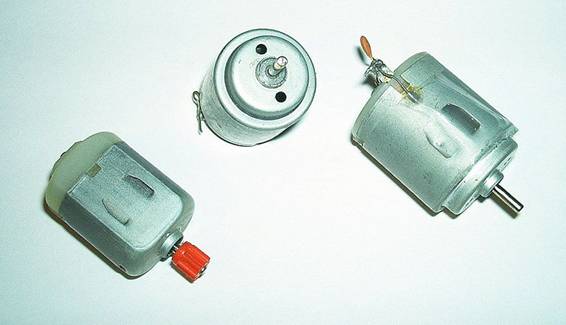
Figura 1
Para la obtención de la velocidad y la
posición del motor se consideró la utilización de
los componentes de un ratón mecánico-óptico ya que
estos dispositivos utilizan un codificador óptico el que
consta de una rueda perforada en 36 ranuras que representan los
360 grados el circulo, esta se mueve por medio de las rotaciones
producidas por una esfera de acero recubierta por una capa de
hule, y el codificador, el que se encarga de generar los pulsos
transmitidos a un controlador que permite la interconexión
entre la computadora y el
periférico, es el transductor de los impulsos generados por
el circuito conectado a la parte mecánica, como se observa
en la Figura 2.

Figura 2
Fuentes PWM
Debido a que los motores de corriente continua necesitan
ser "alimentados" con un pulso de magnitud determinada, se
utiliza una fuente de Control de Ancho de Pulso (PWM
Pulse Width Modulated de sus siglas en inglés) para que se pueda
regular la velocidad de encendido y funcionamiento de una manera
uniforme ya que en el momento de implementar este tipo de motores
es necesario obtener error mínimo en el movimiento desde el
momento de inicio del motor y durante los posibles cambios que se
harán en el circuito. La fuente PWM produce los pulsos con
un ciclo de trabajo determinado porque en
el momento de que el circuito necesite menos tiempo de trabajo realiza la
variación.
Para el control de motores DC, se debe considerar el
siguiente diagrama de bloques de la
Figura 3, ya que para la construcción de cualquier
dispositivo se debe hacer una división de cada grupo o conjunto involucrado
en general.
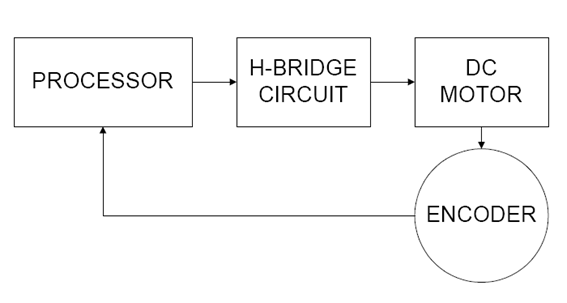
Figura 3
Para el control en general se usa el microcontrolador
Motorota MC68HC908QB8, este "procesador" proporciona la fuente
PWM, el Puente H genera la potencia suficiente para el movimiento
y también es una protección al controlador y el
Codificador informa el momento de que ocurre el suceso
determinado.
Debido a que los motores en el arranque utilizan
más energía también requieren un tiempo mayor para
estabilizarse como se puede apreciar en la Figura 4
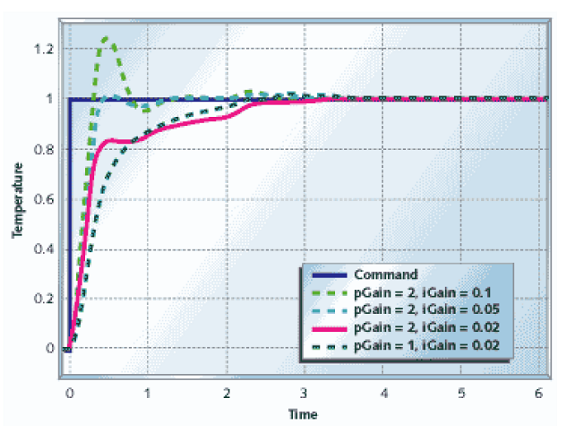
Figura 4
Controlador PID
Para obtener los resultados deseados en las variaciones
se debe utilizar un controlador PID (Proporcional, Integral y
Derivador), ya que el Proporcional reduce el tiempo del pico,
pero no elimina la diferencia generada entre el tiempo de inicio
y el tiempo general, el control Integral elimina la diferencia
del tiempo pero hace que la respuesta de transición sea peor
por lo que también se implementa un Derivador que reduce el
tiempo de disparo y mejora la respuesta de transición. En la
Figura 5 se puede observar este fenómeno.
Página siguiente  |